 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraNCE: Transformative Non-linear Concept Explainer for CNNs
Mar 26, 2025Convolutional neural networks (CNNs) have succeeded remarkably in various computer vision tasks. However, they are not intrinsically explainable. While the feature-level understanding of CNNs reveals where the models looked, concept-based explainability methods provide insights into what the models saw. However, their assumption of linear reconstructability of image activations fails to capture the intricate relationships within these activations. Their Fidelity-only approach to evaluating global explanations also presents a new concern. For the first time, we address these limitations with the novel Transformative Nonlinear Concept Explainer (TraNCE) for CNNs. Unlike linear reconstruction assumptions made by existing methods, TraNCE captures the intricate relationships within the activations. This study presents three original contributions to the CNN explainability literature: (i) An automatic concept discovery mechanism based on variational autoencoders (VAEs). This transformative concept discovery process enhances the identification of meaningful concepts from image activations. (ii) A visualization module that leverages the Bessel function to create a smooth transition between prototypical image pixels, revealing not only what the CNN saw but also what the CNN avoided, thereby mitigating the challenges of concept duplication as documented in previous works. (iii) A new metric, the Faith score, integrates both Coherence and Fidelity for a comprehensive evaluation of explainer faithfulness and consistency.
Efficient Data-driven Joint-level Calibration of Cable-driven Surgical Robots
Aug 02, 2024Knowing accurate joint positions is crucial for safe and precise control of laparoscopic surgical robots, especially for the automation of surgical sub-tasks. These robots have often been designed with cable-driven arms and tools because cables allow for larger motors to be placed at the base of the robot, further from the operating area where space is at a premium. However, by connecting the joint to its motor with a cable, any stretch in the cable can lead to errors in kinematic estimation from encoders at the motor, which can result in difficulties for accurate control of the surgical tool. In this work, we propose an efficient data-driven calibration of positioning joints of such robots, in this case the RAVEN-II surgical robotics research platform. While the calibration takes only 8-21 minutes, the accuracy of the calibrated joints remains high during a 6-hour heavily loaded operation, suggesting desirable feasibility in real practice. The calibration models take original robot states as input and are trained using zig-zag trajectories within a desired sparsity, requiring no additional sensors after training. Compared to fixed offset compensation, the Deep Neural Network calibration model can further reduce 76 percent of error and achieve accuracy of 0.104 deg, 0.120 deg, and 0.118 mm in joints 1, 2, and 3, respectively. In contrast to end-to-end models, experiments suggest that the DNN model achieves better accuracy and faster convergence when outputting the error to correct original inaccurate joint positions. Furthermore, a linear regression model is shown to have 160 times faster inference speed than DNN models for application within the 1000 Hz servo control loop, with slightly compromised accuracy.
Ablation Study on Features in Learning-based Joints Calibration of Cable-driven Surgical Robots
Feb 14, 2023



With worldwide implementation, millions of surgeries are assisted by surgical robots. The cable-drive mechanism on many surgical robots allows flexible, light, and compact arms and tools. However, the slack and stretch of the cables and the backlash of the gears introduce inevitable errors from motor poses to joint poses, and thus forwarded to the pose and orientation of the end-effector. In this paper, a learning-based calibration using a deep neural network is proposed, which reduces the unloaded pose RMSE of joints 1, 2, 3 to 0.3003 deg, 0.2888 deg, 0.1565 mm, and loaded pose RMSE of joints 1, 2, 3 to 0.4456 deg, 0.3052 deg, 0.1900 mm, respectively. Then, removal ablation and inaccurate ablation are performed to study which features of the DNN model contribute to the calibration accuracy. The results suggest that raw joint poses and motor torques are the most important features. For joint poses, the removal ablation shows that DNN model can derive this information from end-effector pose and orientation. For motor torques, the direction is much more important than amplitude.
Evaluation of an Inflated Beam Model Applied to Everted Tubes
Jul 12, 2021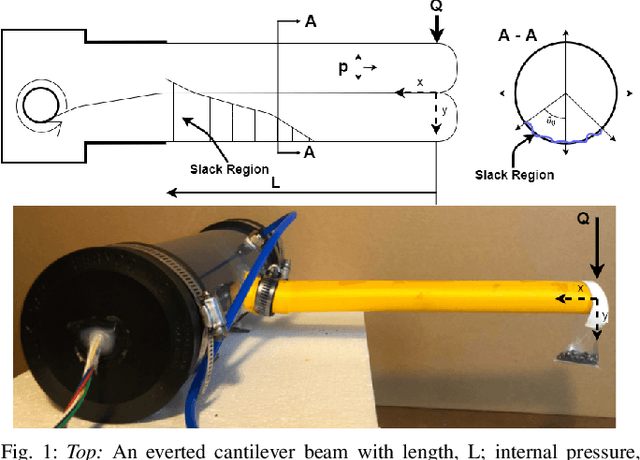
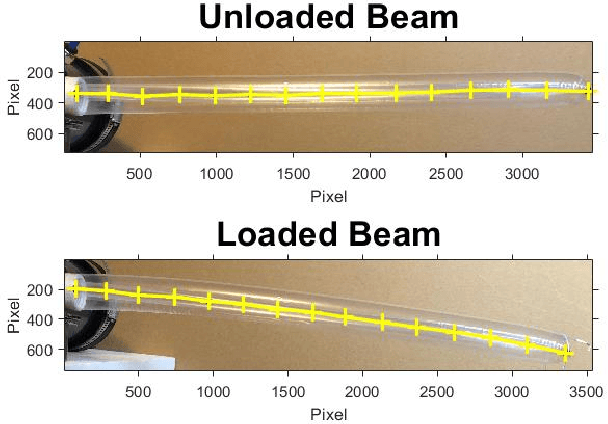
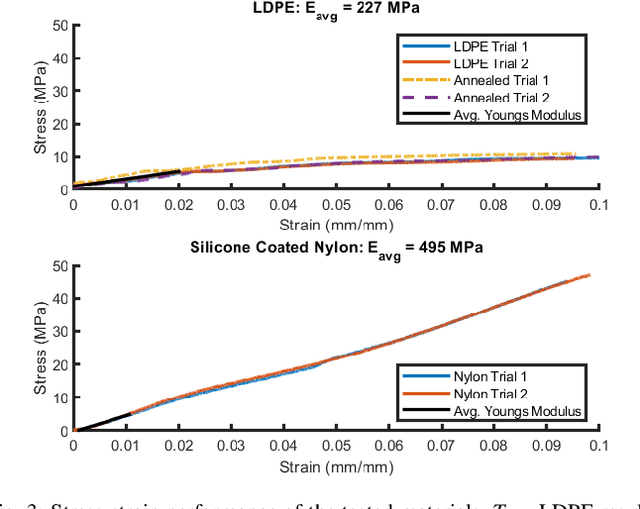
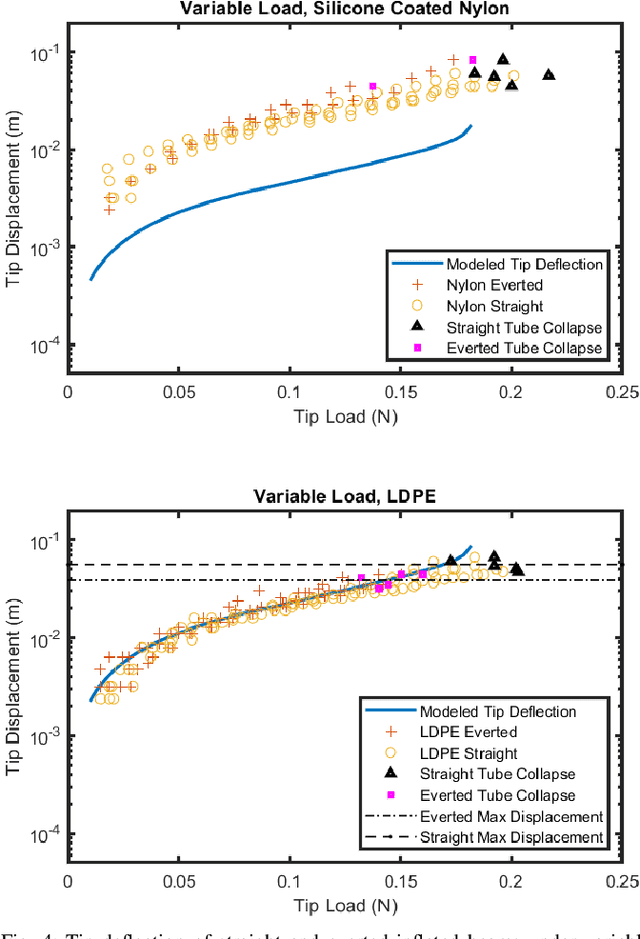
Everted tubes have often been modeled as inflated beams to determine transverse and axial buckling conditions. This paper seeks to validate the assumption that an everted tube can be modeled in this way. The tip deflections of everted and uneverted beams under transverse cantilever loads are compared with a tip deflection model that was first developed for aerospace applications. LDPE and silicone coated nylon beams were tested; everted and uneverted beams showed similar tip deflection. The literature model best fit the tip deflection of LDPE tubes with an average tip deflection error of 6 mm, while the nylon tubes had an average tip deflection error of 16.4 mm. Everted beams of both materials buckled at 83% of the theoretical buckling condition while straight beams collapsed at 109% of the theoretical buckling condition. The curvature of everted beams was estimated from a tip load and a known displacement showing relative errors of 14.2% and 17.3% for LDPE and nylon beams respectively. This paper shows a numerical method for determining inflated beam deflection. It also provides an iterative method for computing static tip pose and applied wall forces in a known environment.
Systems-theoretic Safety Assessment of Robotic Telesurgical Systems
Jul 08, 2015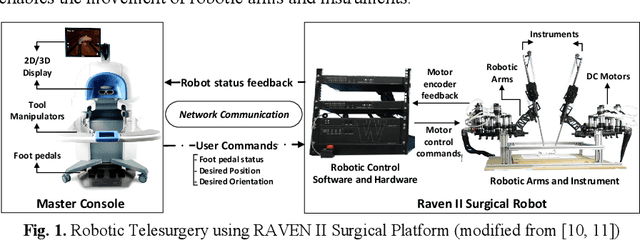
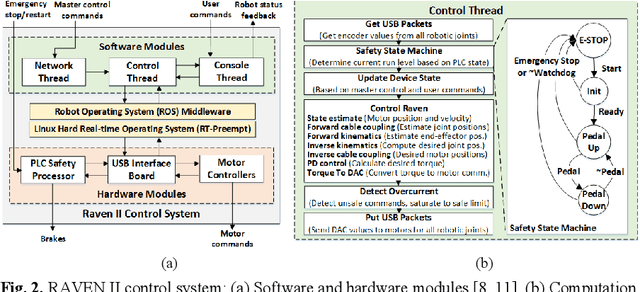
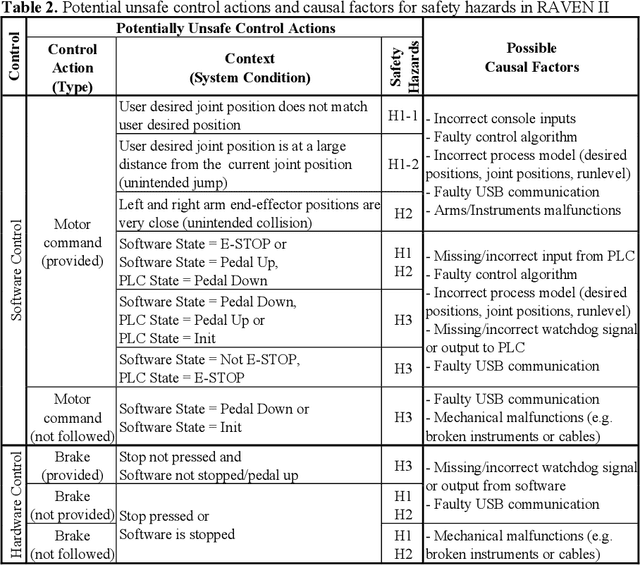
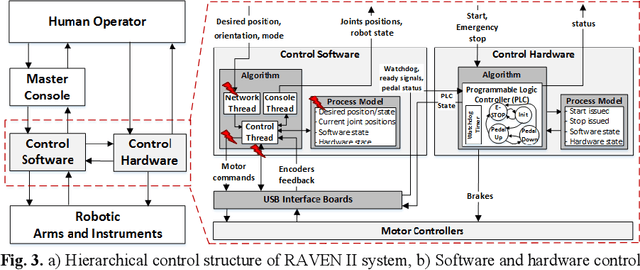
Robotic telesurgical systems are one of the most complex medical cyber-physical systems on the market, and have been used in over 1.75 million procedures during the last decade. Despite significant improvements in design of robotic surgical systems through the years, there have been ongoing occurrences of safety incidents during procedures that negatively impact patients. This paper presents an approach for systems-theoretic safety assessment of robotic telesurgical systems using software-implemented fault-injection. We used a systemstheoretic hazard analysis technique (STPA) to identify the potential safety hazard scenarios and their contributing causes in RAVEN II robot, an open-source robotic surgical platform. We integrated the robot control software with a softwareimplemented fault-injection engine which measures the resilience of the system to the identified safety hazard scenarios by automatically inserting faults into different parts of the robot control software. Representative hazard scenarios from real robotic surgery incidents reported to the U.S. Food and Drug Administration (FDA) MAUDE database were used to demonstrate the feasibility of the proposed approach for safety-based design of robotic telesurgical systems.