 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision in adverse weather: Augmentation using CycleGANs with various object detectors for robust perception in autonomous racing
Jan 11, 2022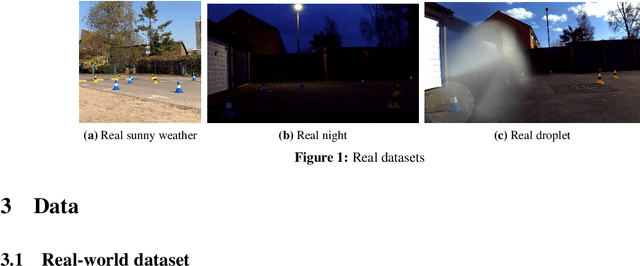
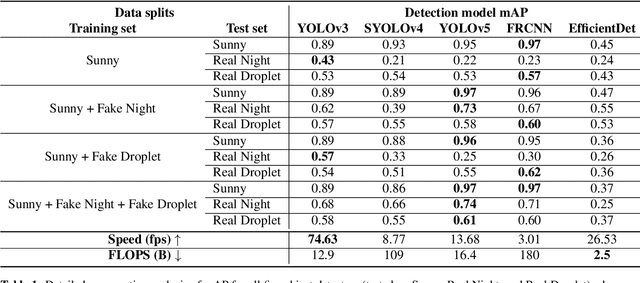
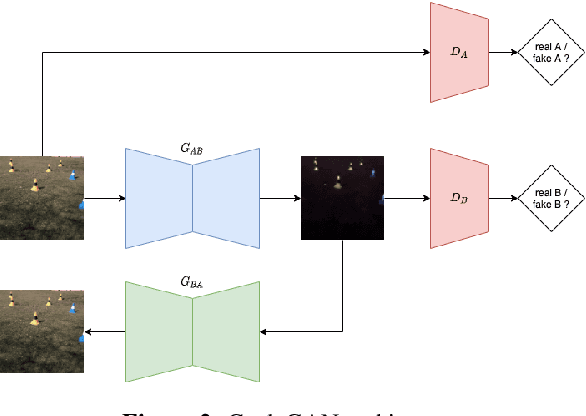
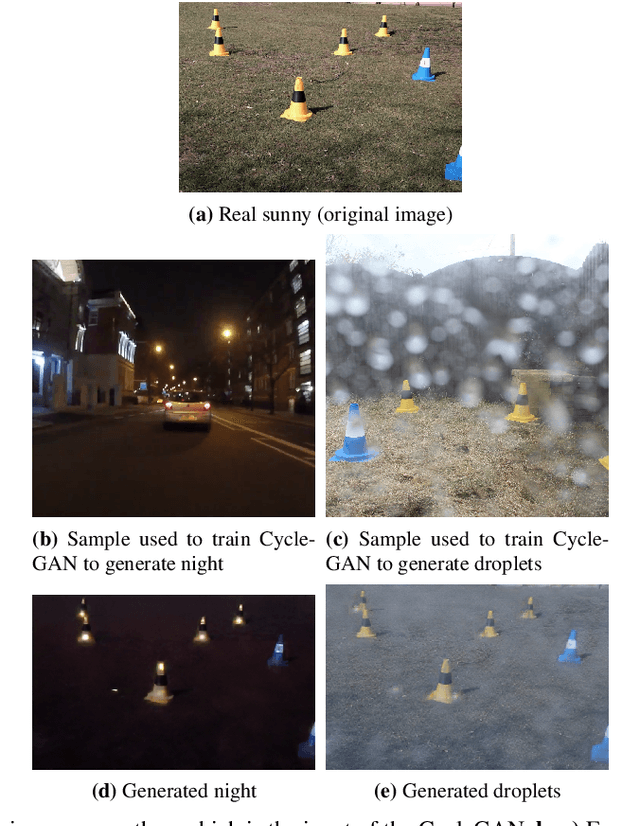
In an autonomous driving system, perception - identification of features and objects from the environment - is crucial. In autonomous racing, high speeds and small margins demand rapid and accurate detection systems. During the race, the weather can change abruptly, causing significant degradation in perception, resulting in ineffective manoeuvres. In order to improve detection in adverse weather, deep-learning-based models typically require extensive datasets captured in such conditions - the collection of which is a tedious, laborious, and costly process. However, recent developments in CycleGAN architectures allow the synthesis of highly realistic scenes in multiple weather conditions. To this end, we introduce an approach of using synthesised adverse condition datasets in autonomous racing (generated using CycleGAN) to improve the performance of four out of five state-of-the-art detectors by an average of 42.7 and 4.4 mAP percentage points in the presence of night-time conditions and droplets, respectively. Furthermore, we present a comparative analysis of five object detectors - identifying the optimal pairing of detector and training data for use during autonomous racing in challenging conditions.
YOLO-Z: Improving small object detection in YOLOv5 for autonomous vehicles
Dec 23, 2021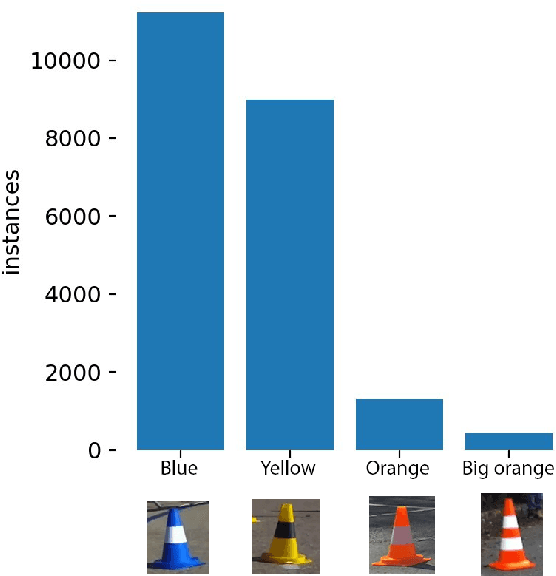


As autonomous vehicles and autonomous racing rise in popularity, so does the need for faster and more accurate detectors. While our naked eyes are able to extract contextual information almost instantly, even from far away, image resolution and computational resources limitations make detecting smaller objects (that is, objects that occupy a small pixel area in the input image) a genuinely challenging task for machines and a wide-open research field. This study explores how the popular YOLOv5 object detector can be modified to improve its performance in detecting smaller objects, with a particular application in autonomous racing. To achieve this, we investigate how replacing certain structural elements of the model (as well as their connections and other parameters) can affect performance and inference time. In doing so, we propose a series of models at different scales, which we name `YOLO-Z', and which display an improvement of up to 6.9% in mAP when detecting smaller objects at 50% IOU, at the cost of just a 3ms increase in inference time compared to the original YOLOv5. Our objective is to inform future research on the potential of adjusting a popular detector such as YOLOv5 to address specific tasks and provide insights on how specific changes can impact small object detection. Such findings, applied to the broader context of autonomous vehicles, could increase the amount of contextual information available to such systems.
Worsening Perception: Real-time Degradation of Autonomous Vehicle Perception Performance for Simulation of Adverse Weather Conditions
Mar 05, 2021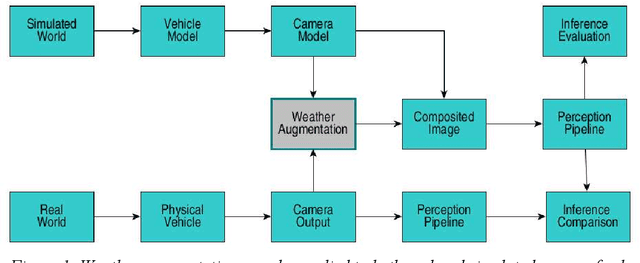
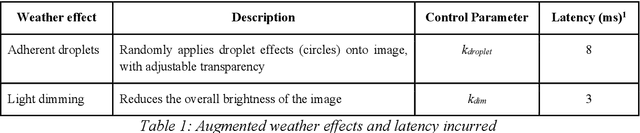
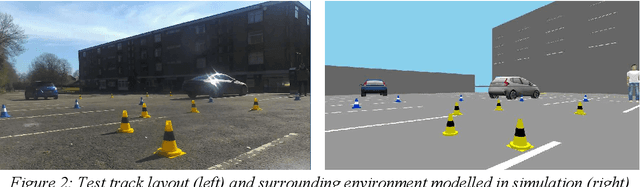
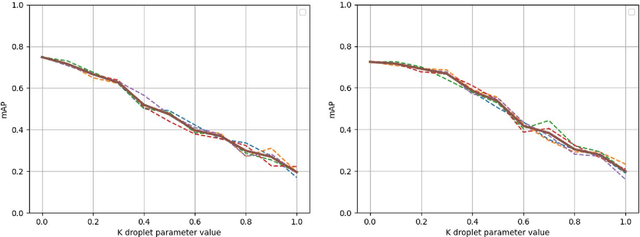
Autonomous vehicles rely heavily upon their perception subsystems to see the environment in which they operate. Unfortunately, the effect of varying weather conditions presents a significant challenge to object detection algorithms, and thus it is imperative to test the vehicle extensively in all conditions which it may experience. However, unpredictable weather can make real-world testing in adverse conditions an expensive and time consuming task requiring access to specialist facilities, and weatherproofing of sensitive electronics. Simulation provides an alternative to real world testing, with some studies developing increasingly visually realistic representations of the real world on powerful compute hardware. Given that subsequent subsystems in the autonomous vehicle pipeline are unaware of the visual realism of the simulation, when developing modules downstream of perception the appearance is of little consequence - rather it is how the perception system performs in the prevailing weather condition that is important. This study explores the potential of using a simple, lightweight image augmentation system in an autonomous racing vehicle - focusing not on visual accuracy, but rather the effect upon perception system performance. With minimal adjustment, the prototype system developed in this study can replicate the effects of both water droplets on the camera lens, and fading light conditions. The system introduces a latency of less than 8 ms using compute hardware that is well suited to being carried in the vehicle - rendering it ideally suited to real-time implementation that can be run during experiments in simulation, and augmented reality testing in the real world.
ROAD: The ROad event Awareness Dataset for Autonomous Driving
Feb 25, 2021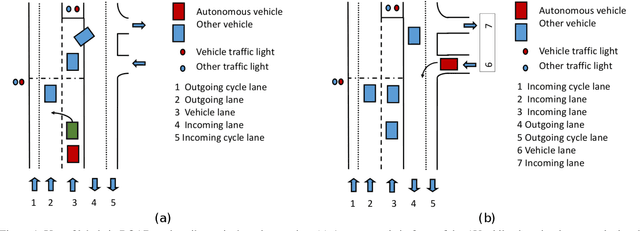
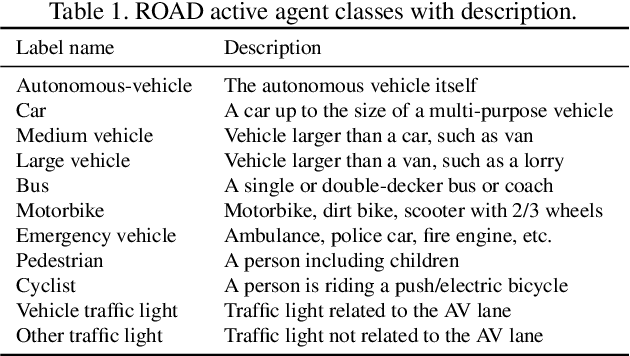
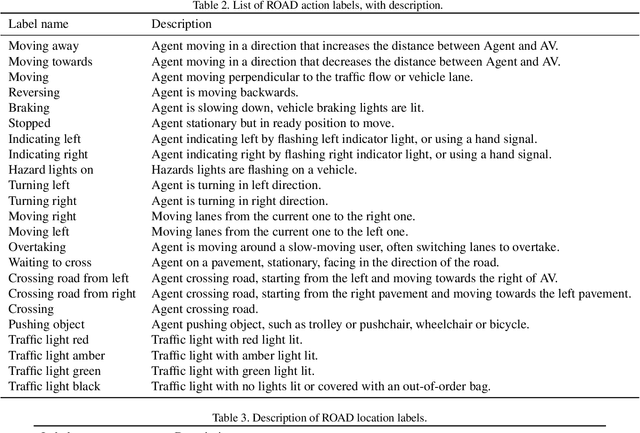

Humans approach driving in a holistic fashion which entails, in particular, understanding road events and their evolution. Injecting these capabilities in an autonomous vehicle has thus the potential to take situational awareness and decision making closer to human-level performance. To this purpose, we introduce the ROad event Awareness Dataset (ROAD) for Autonomous Driving, to our knowledge the first of its kind. ROAD is designed to test an autonomous vehicle's ability to detect road events, defined as triplets composed by a moving agent, the action(s) it performs and the corresponding scene locations. ROAD comprises 22 videos, originally from the Oxford RobotCar Dataset, annotated with bounding boxes showing the location in the image plane of each road event. We also provide as baseline a new incremental algorithm for online road event awareness, based on inflating RetinaNet along time, which achieves a mean average precision of 16.8% and 6.1% for frame-level and video-level event detection, respectively, at 50% overlap. Though promising, these figures highlight the challenges faced by situation awareness in autonomous driving. Finally, ROAD allows scholars to investigate exciting tasks such as complex (road) activity detection, future road event anticipation and the modelling of sentient road agents in terms of mental states. Dataset can be obtained from https://github.com/gurkirt/road-dataset and baseline code from https://github.com/gurkirt/3D-RetinaNet.
Real-Time Optimal Trajectory Planning for Autonomous Vehicles and Lap Time Simulation Using Machine Learning
Feb 05, 2021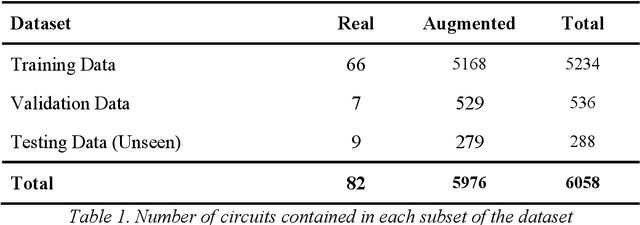
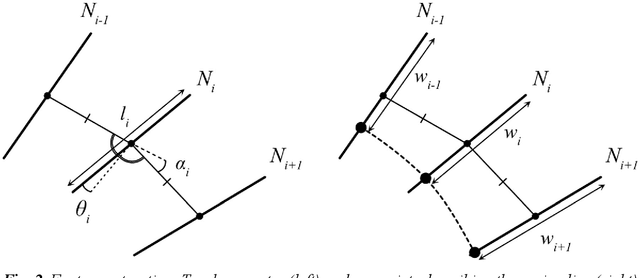
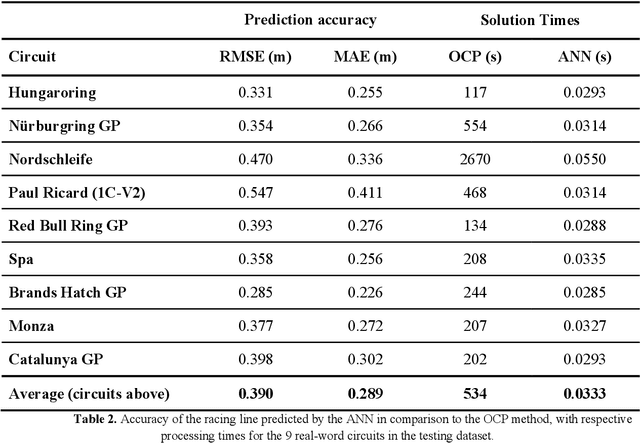

The widespread development of driverless vehicles has led to the formation of autonomous racing competitions, where the high speeds and fierce rivalry in motorsport provide a testbed to accelerate technology development. A particular challenge for an autonomous vehicle is that of identifying a target trajectory - or in the case of a racing car, the ideal racing line. Many existing approaches to identifying the racing line are either not the time-optimal solutions, or have solution times which are computationally expensive, thus rendering them unsuitable for real-time application using on-board processing hardware. This paper describes a machine learning approach to generating an accurate prediction of the racing line in real-time on desktop processing hardware. The proposed algorithm is a dense feed-forward neural network, trained using a dataset comprising racing lines for a large number of circuits calculated via a traditional optimal control lap time simulation. The network is capable of predicting the racing line with a mean absolute error of +/-0.27m, meaning that the accuracy outperforms a human driver, and is comparable to other parts of the autonomous vehicle control system. The system generates predictions within 33ms, making it over 9,000 times faster than traditional methods of finding the optimal racing line. Results suggest that a data-driven approach may therefore be favourable for real-time generation of near-optimal racing lines than traditional computational methods.