 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePathSpace: Rapid continuous map approximation for efficient SLAM using B-Splines in constrained environments
Mar 03, 2026Simultaneous Localization and Mapping (SLAM) plays a crucial role in enabling autonomous vehicles to navigate previously unknown environments. Semantic SLAM mostly extends visual SLAM, leveraging the higher density information available to reason about the environment in a more human-like manner. This allows for better decision making by exploiting prior structural knowledge of the environment, usually in the form of labels. Current semantic SLAM techniques still mostly rely on a dense geometric representation of the environment, limiting their ability to apply constraints based on context. We propose PathSpace, a novel semantic SLAM framework that uses continuous B-splines to represent the environment in a compact manner, while also maintaining and reasoning through the continuous probability density functions required for probabilistic reasoning. This system applies the multiple strengths of B-splines in the context of SLAM to interpolate and fit otherwise discrete sparse environments. We test this framework in the context of autonomous racing, where we exploit pre-specified track characteristics to produce significantly reduced representations at comparable levels of accuracy to traditional landmark based methods and demonstrate its potential in limiting the resources used by a system with minimal accuracy loss.
(hu)Man vs. Machine: In the Future of Motorsport, can Autonomous Vehicles Compete?
Mar 02, 2026Motorsport has historically driven technological innovation in the automotive industry. Autonomous racing provides a proving ground to push the limits of performance of autonomous vehicle (AV) systems. In principle, AVs could be at least as fast, if not faster, than humans. However, human driven racing provides broader audience appeal thus far, and is more strategically challenging. Both provide opportunities to push each other even further technologically, yet competitions remain separate. This paper evaluates whether the future of motorsport could encompass joint competition between humans and AVs. Analysis of the current state of the art, as well as recent competition outcomes, shows that while technical performance has reached comparable levels, there are substantial challenges in racecraft, strategy and safety that need to be overcome. Outstanding issues involved in mixed human-AI racing, ranging from an initial assessment of critical factors such as system-level latencies, to effective planning and risk guarantees are explored. The crucial non-technical aspect of audience engagement and appeal regarding the changing character of motorsport is addressed. In the wider context of motorsport and AVs, this work outlines a proposed agenda for future research to 'keep pushing the possible', in the true spirit of motorsport.
SEG-JPEG: Simple Visual Semantic Communications for Remote Operation of Automated Vehicles over Unreliable Wireless Networks
Feb 16, 2026Remote Operation is touted as being key to the rapid deployment of automated vehicles. Streaming imagery to control connected vehicles remotely currently requires a reliable, high throughput network connection, which can be limited in real-world remote operation deployments relying on public network infrastructure. This paper investigates how the application of computer vision assisted semantic communication can be used to circumvent data loss and corruption associated with traditional image compression techniques. By encoding the segmentations of detected road users into colour coded highlights within low resolution greyscale imagery, the required data rate can be reduced by 50 \% compared with conventional techniques, while maintaining visual clarity. This enables a median glass-to-glass latency of below 200ms even when the network data rate is below 500kbit/s, while clearly outlining salient road users to enhance situational awareness of the remote operator. The approach is demonstrated in an area of variable 4G mobile connectivity using an automated last-mile delivery vehicle. With this technique, the results indicate that large-scale deployment of remotely operated automated vehicles could be possible even on the often constrained public 4G/5G mobile network, providing the potential to expedite the nationwide roll-out of automated vehicles.
Vision in adverse weather: Augmentation using CycleGANs with various object detectors for robust perception in autonomous racing
Jan 11, 2022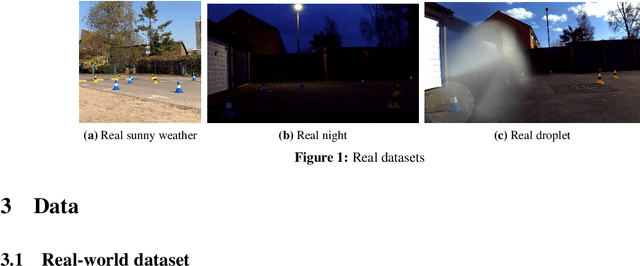
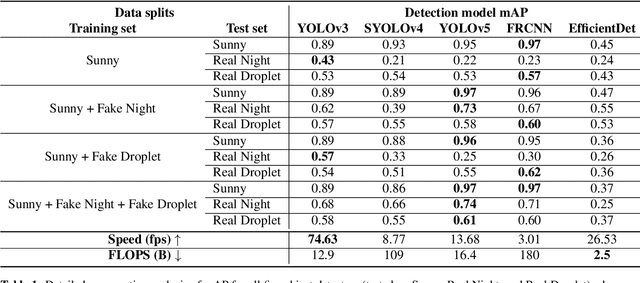
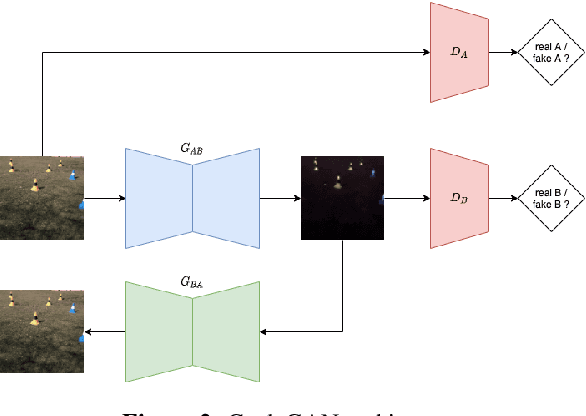
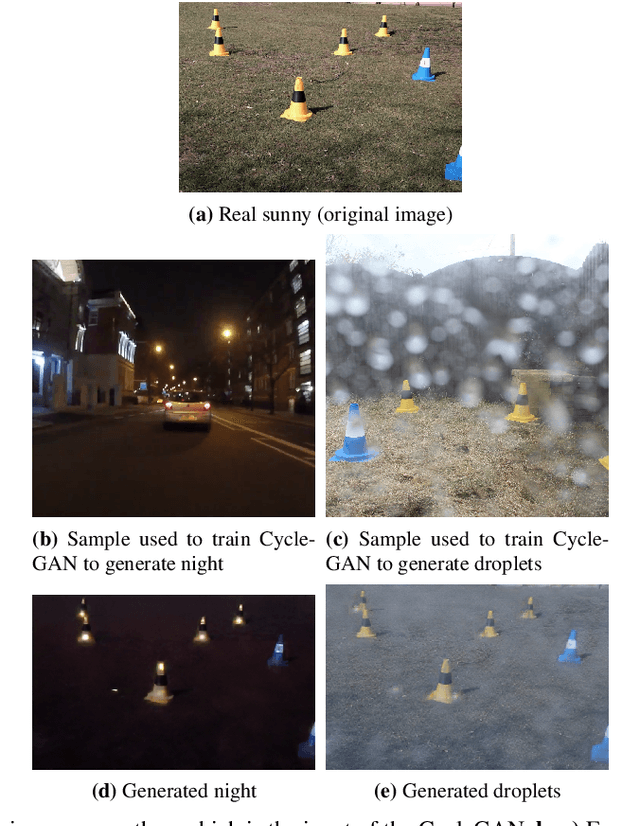
In an autonomous driving system, perception - identification of features and objects from the environment - is crucial. In autonomous racing, high speeds and small margins demand rapid and accurate detection systems. During the race, the weather can change abruptly, causing significant degradation in perception, resulting in ineffective manoeuvres. In order to improve detection in adverse weather, deep-learning-based models typically require extensive datasets captured in such conditions - the collection of which is a tedious, laborious, and costly process. However, recent developments in CycleGAN architectures allow the synthesis of highly realistic scenes in multiple weather conditions. To this end, we introduce an approach of using synthesised adverse condition datasets in autonomous racing (generated using CycleGAN) to improve the performance of four out of five state-of-the-art detectors by an average of 42.7 and 4.4 mAP percentage points in the presence of night-time conditions and droplets, respectively. Furthermore, we present a comparative analysis of five object detectors - identifying the optimal pairing of detector and training data for use during autonomous racing in challenging conditions.
Worsening Perception: Real-time Degradation of Autonomous Vehicle Perception Performance for Simulation of Adverse Weather Conditions
Mar 05, 2021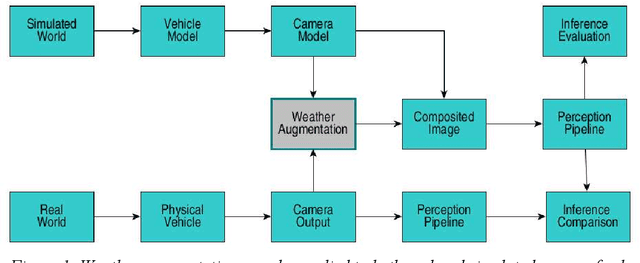
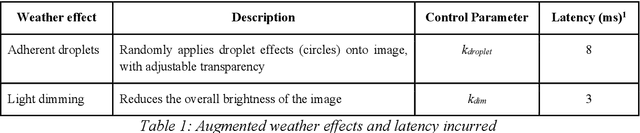
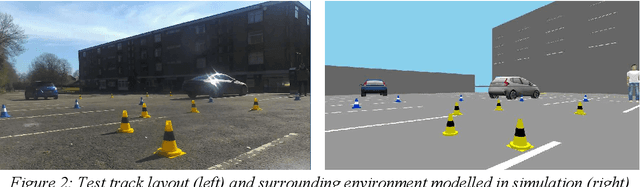
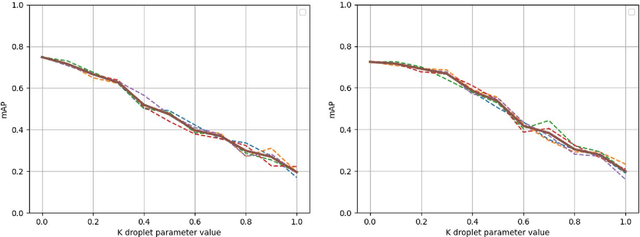
Autonomous vehicles rely heavily upon their perception subsystems to see the environment in which they operate. Unfortunately, the effect of varying weather conditions presents a significant challenge to object detection algorithms, and thus it is imperative to test the vehicle extensively in all conditions which it may experience. However, unpredictable weather can make real-world testing in adverse conditions an expensive and time consuming task requiring access to specialist facilities, and weatherproofing of sensitive electronics. Simulation provides an alternative to real world testing, with some studies developing increasingly visually realistic representations of the real world on powerful compute hardware. Given that subsequent subsystems in the autonomous vehicle pipeline are unaware of the visual realism of the simulation, when developing modules downstream of perception the appearance is of little consequence - rather it is how the perception system performs in the prevailing weather condition that is important. This study explores the potential of using a simple, lightweight image augmentation system in an autonomous racing vehicle - focusing not on visual accuracy, but rather the effect upon perception system performance. With minimal adjustment, the prototype system developed in this study can replicate the effects of both water droplets on the camera lens, and fading light conditions. The system introduces a latency of less than 8 ms using compute hardware that is well suited to being carried in the vehicle - rendering it ideally suited to real-time implementation that can be run during experiments in simulation, and augmented reality testing in the real world.