 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving the Segmentation of Scanning Probe Microscope Images using Convolutional Neural Networks
Aug 27, 2020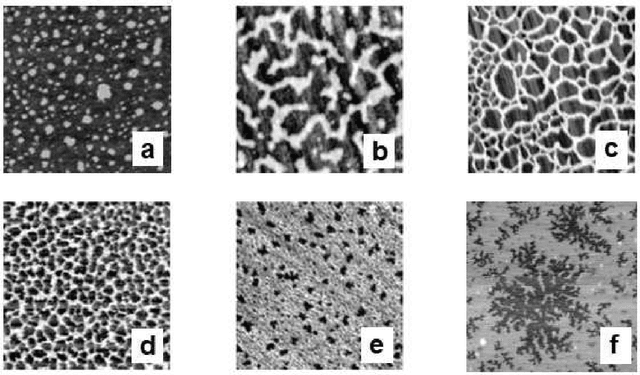
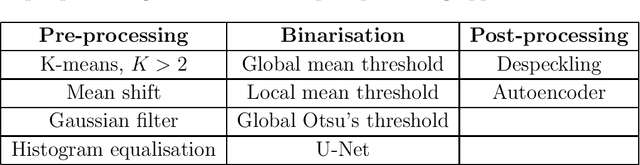
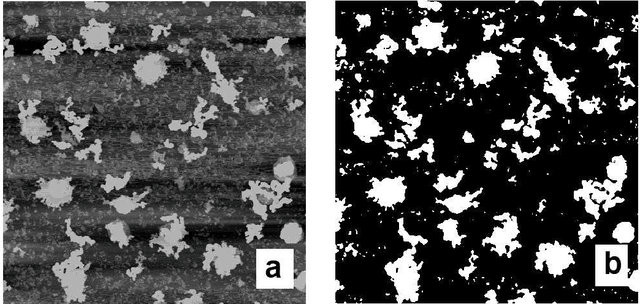

A wide range of techniques can be considered for segmentation of images of nanostructured surfaces. Manually segmenting these images is time-consuming and results in a user-dependent segmentation bias, while there is currently no consensus on the best automated segmentation methods for particular techniques, image classes, and samples. Any image segmentation approach must minimise the noise in the images to ensure accurate and meaningful statistical analysis can be carried out. Here we develop protocols for the segmentation of images of 2D assemblies of gold nanoparticles formed on silicon surfaces via deposition from an organic solvent. The evaporation of the solvent drives far-from-equilibrium self-organisation of the particles, producing a wide variety of nano- and micro-structured patterns. We show that a segmentation strategy using the U-Net convolutional neural network outperforms traditional automated approaches and has particular potential in the processing of images of nanostructured systems.
Fast and automated biomarker detection in breath samples with machine learning
May 24, 2020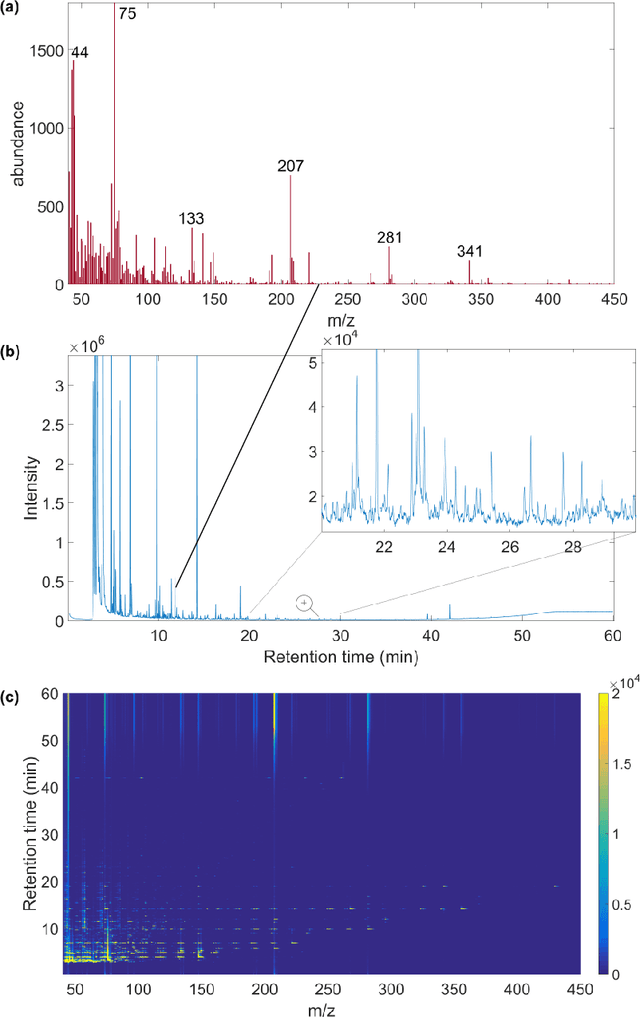
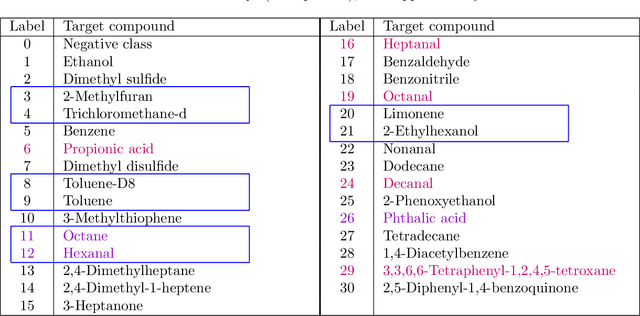
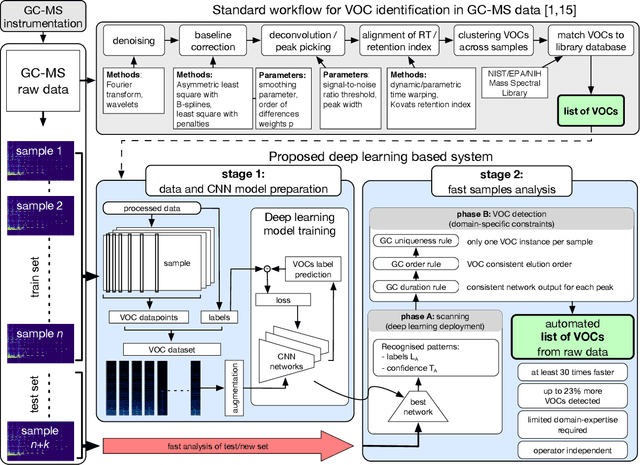
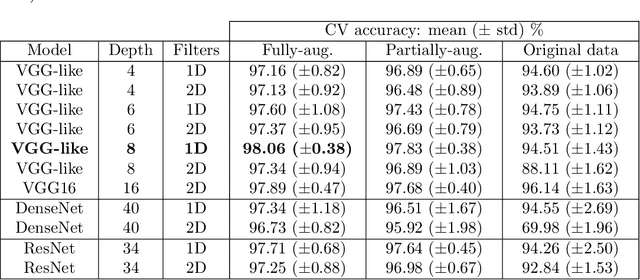
Volatile organic compounds (VOCs) in human breath can reveal a large spectrum of health conditions and can be used for fast, accurate and non-invasive diagnostics. Gas chromatography-mass spectrometry (GC-MS) is used to measure VOCs, but its application is limited by expert-driven data analysis that is time-consuming, subjective and may introduce errors. We propose a system to perform GC-MS data analysis that exploits deep learning pattern recognition ability to learn and automatically detect VOCs directly from raw data, thus bypassing expert-led processing. The new proposed approach showed to outperform the expert-led analysis by detecting a significantly higher number of VOCs in just a fraction of time while maintaining high specificity. These results suggest that the proposed method can help the large-scale deployment of breath-based diagnosis by reducing time and cost, and increasing accuracy and consistency.
Evolving Inborn Knowledge For Fast Adaptation in Dynamic POMDP Problems
Apr 28, 2020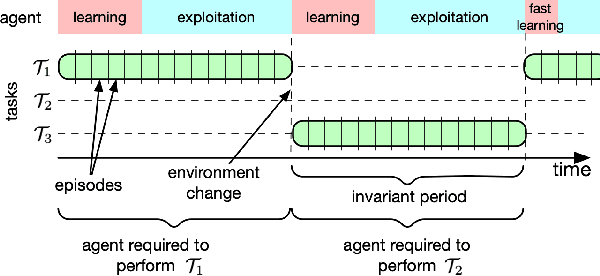
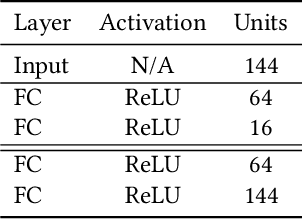
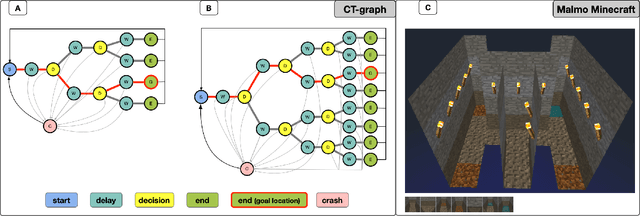
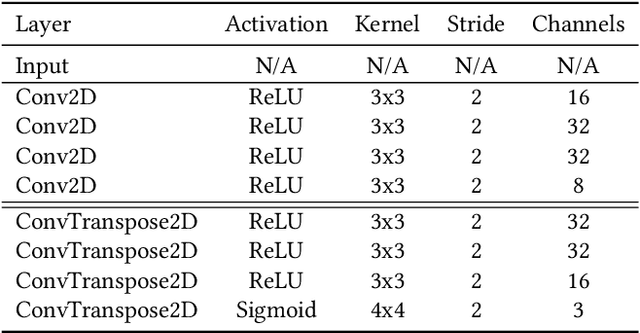
Rapid online adaptation to changing tasks is an important problem in machine learning and, recently, a focus of meta-reinforcement learning. However, reinforcement learning (RL) algorithms struggle in POMDP environments because the state of the system, essential in a RL framework, is not always visible. Additionally, hand-designed meta-RL architectures may not include suitable computational structures for specific learning problems. The evolution of online learning mechanisms, on the contrary, has the ability to incorporate learning strategies into an agent that can (i) evolve memory when required and (ii) optimize adaptation speed to specific online learning problems. In this paper, we exploit the highly adaptive nature of neuromodulated neural networks to evolve a controller that uses the latent space of an autoencoder in a POMDP. The analysis of the evolved networks reveals the ability of the proposed algorithm to acquire inborn knowledge in a variety of aspects such as the detection of cues that reveal implicit rewards, and the ability to evolve location neurons that help with navigation. The integration of inborn knowledge and online plasticity enabled fast adaptation and better performance in comparison to some non-evolutionary meta-reinforcement learning algorithms. The algorithm proved also to succeed in the 3D gaming environment Malmo Minecraft.
Deep Reinforcement Learning with Modulated Hebbian plus Q Network Architecture
Sep 21, 2019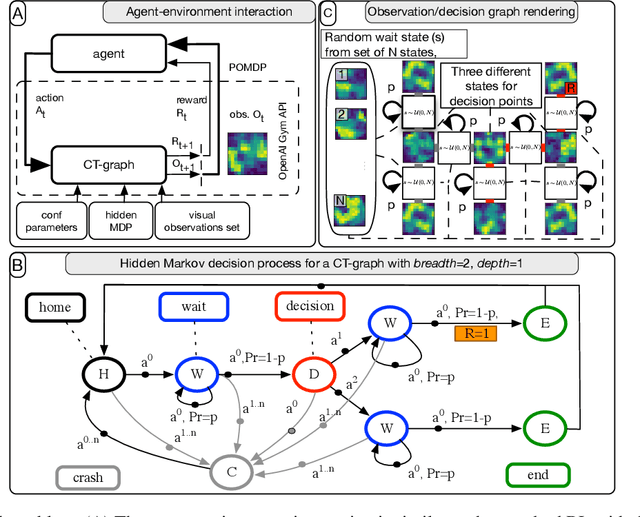
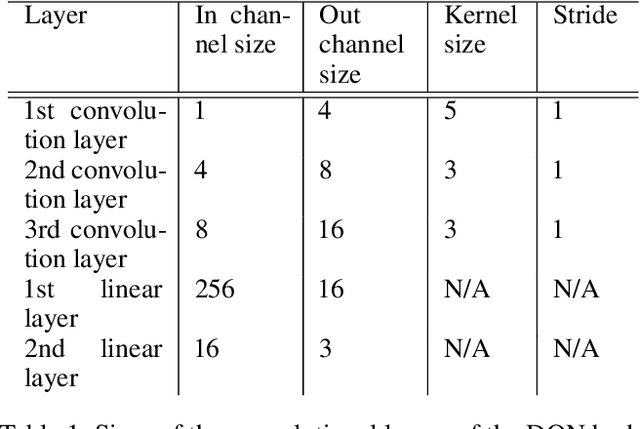
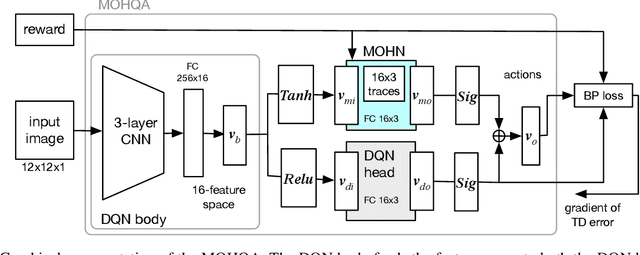
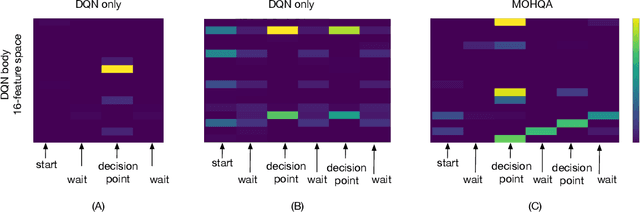
This paper introduces the modulated Hebbian plus Q network architecture (MOHQA) for solving challenging partially observable Markov decision processes (POMDPs) deep reinforcement learning problems with sparse rewards and confounding observations. The proposed architecture combines a deep Q-network (DQN), and a modulated Hebbian network with neural eligibility traces (MOHN). Bio-inspired neural traces are used to bridge temporal delays between actions and rewards. The purpose is to discover distal cause-effect relationships where confounding observations and sparse rewards cause standard RL algorithms to fail. Each of the two modules of the network (DQN and MOHN) is responsible for different aspects of learning. DQN learns low level features and control, while MOHN contributes to the high-level decisions by bridging rewards with past actions. The strength of the approach is to support a DQN standard framework when temporal difference errors are difficult to compute due to non-observable states. The system is tested on a set of generalized decision making problems encoded as decision tree graphs that deliver delayed rewards after key decision points and confounding observations. The simulations show that the proposed approach helps solve problems that are currently challenging for state-of-the-art deep reinforcement learning algorithms.
A Multi-Scale Mapping Approach Based on a Deep Learning CNN Model for Reconstructing High-Resolution Urban DEMs
Jul 19, 2019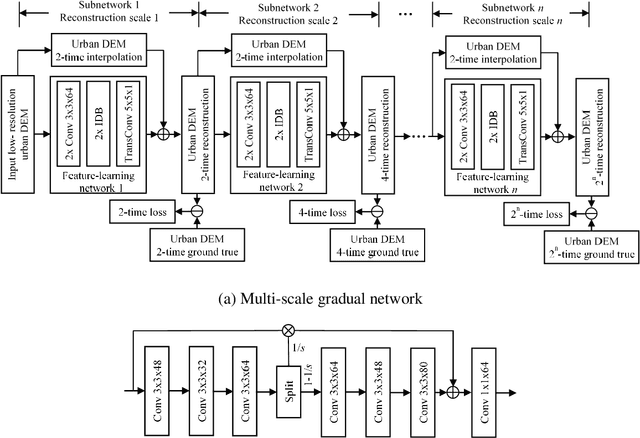
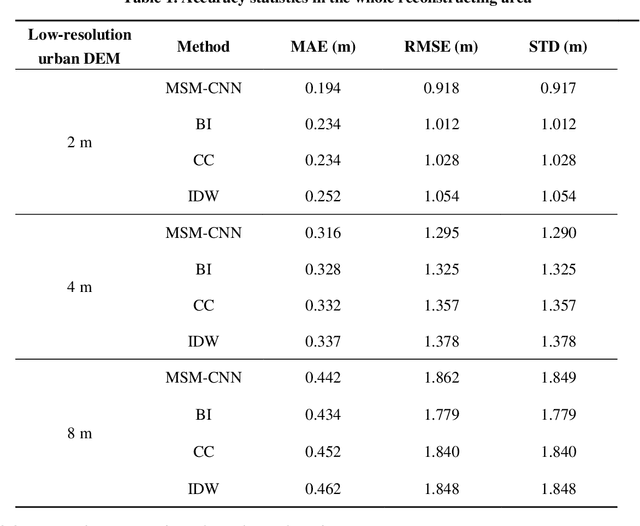
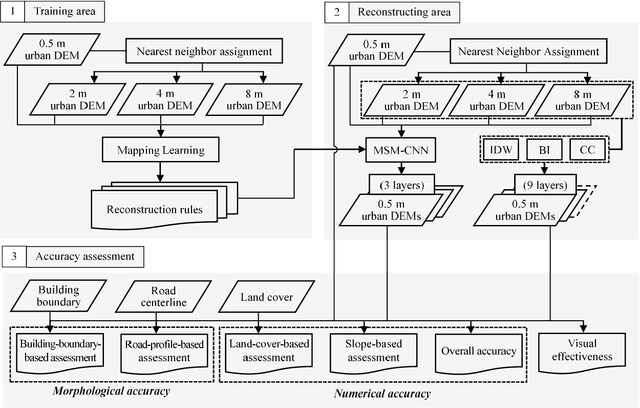
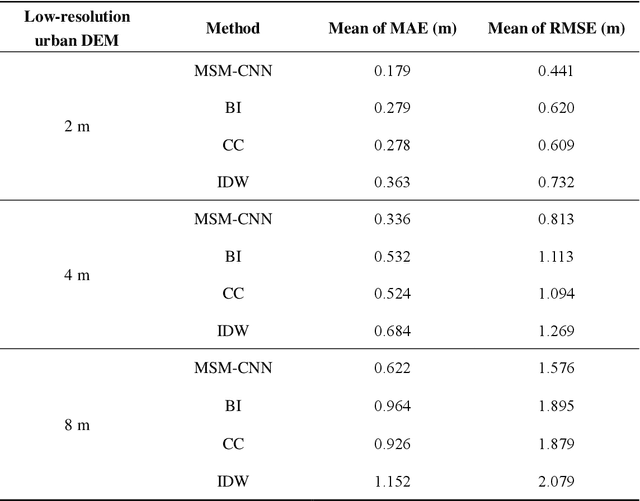
The shortage of high-resolution urban digital elevation model (DEM) datasets has been a challenge for modelling urban flood and managing its risk. A solution is to develop effective approaches to reconstruct high-resolution DEMs from their low-resolution equivalents that are more widely available. However, the current high-resolution DEM reconstruction approaches mainly focus on natural topography. Few attempts have been made for urban topography which is typically an integration of complex man-made and natural features. This study proposes a novel multi-scale mapping approach based on convolutional neural network (CNN) to deal with the complex characteristics of urban topography and reconstruct high-resolution urban DEMs. The proposed multi-scale CNN model is firstly trained using urban DEMs that contain topographic features at different resolutions, and then used to reconstruct the urban DEM at a specified (high) resolution from a low-resolution equivalent. A two-level accuracy assessment approach is also designed to evaluate the performance of the proposed urban DEM reconstruction method, in terms of numerical accuracy and morphological accuracy. The proposed DEM reconstruction approach is applied to a 121 km2 urbanized area in London, UK. Compared with other commonly used methods, the current CNN based approach produces superior results, providing a cost-effective innovative method to acquire high-resolution DEMs in other data-scarce environments.
A Fully Convolutional Two-Stream Fusion Network for Interactive Image Segmentation
Oct 02, 2018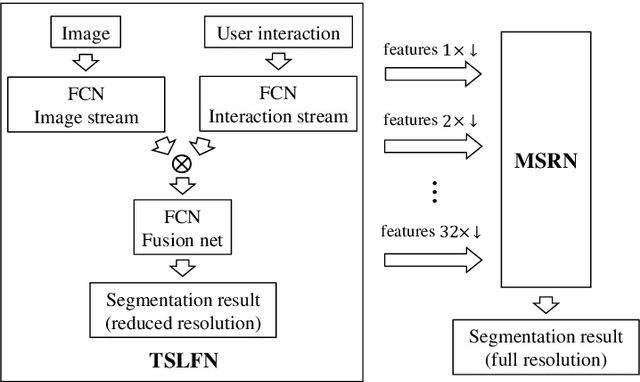
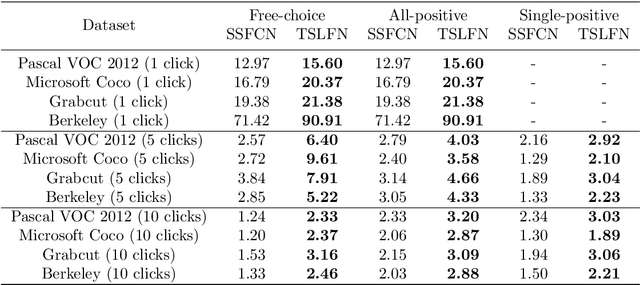
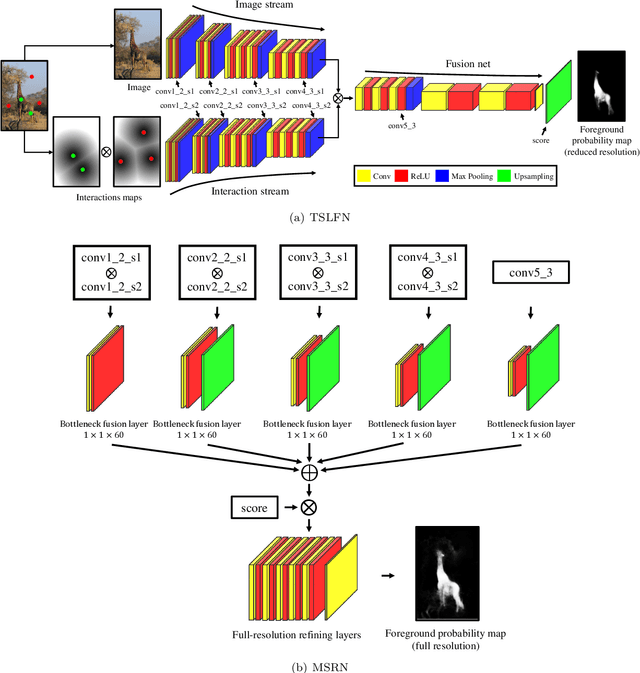
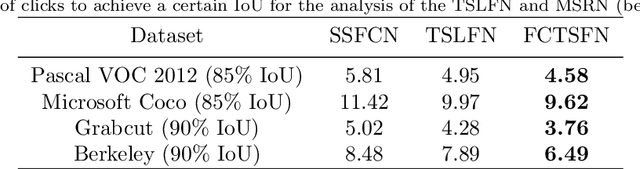
In this paper, we propose a novel fully convolutional two-stream fusion network (FCTSFN) for interactive image segmentation. The proposed network includes two sub-networks: a two-stream late fusion network (TSLFN) that predicts the foreground at a reduced resolution, and a multi-scale refining network (MSRN) that refines the foreground at full resolution. The TSLFN includes two distinct deep streams followed by a fusion network. The intuition is that, since user interactions are more direct information on foreground/background than the image itself, the two-stream structure of the TSLFN reduces the number of layers between the pure user interaction features and the network output, allowing the user interactions to have a more direct impact on the segmentation result. The MSRN fuses the features from different layers of TSLFN with different scales, in order to seek the local to global information on the foreground to refine the segmentation result at full resolution. We conduct comprehensive experiments on four benchmark datasets. The results show that the proposed network achieves competitive performance compared to current state-of-the-art interactive image segmentation methods
Born to Learn: the Inspiration, Progress, and Future of Evolved Plastic Artificial Neural Networks
Aug 08, 2018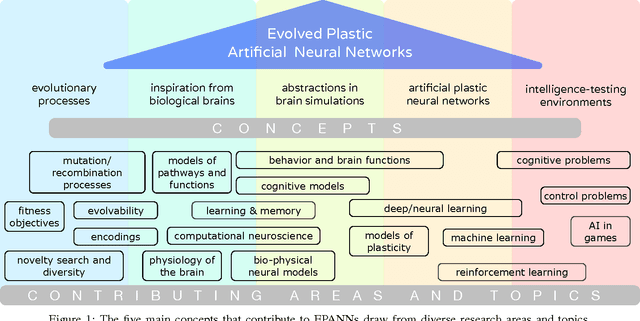
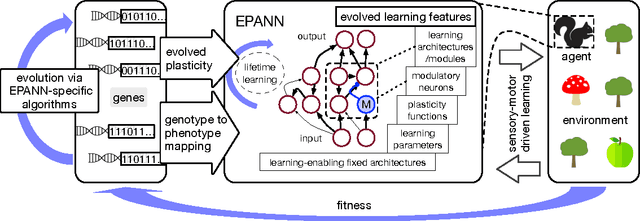
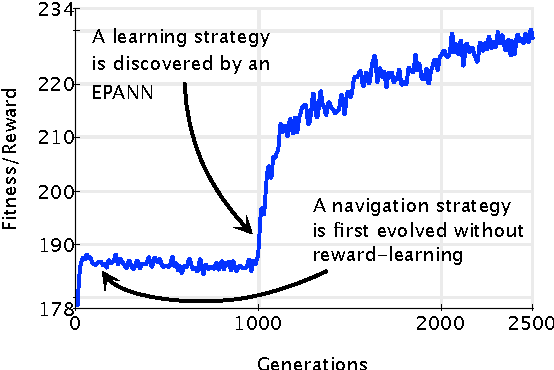
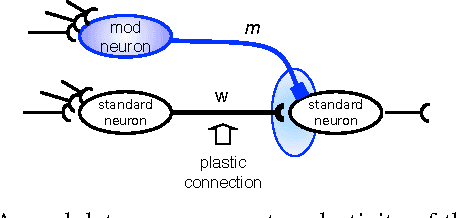
Biological plastic neural networks are systems of extraordinary computational capabilities shaped by evolution, development, and lifetime learning. The interplay of these elements leads to the emergence of adaptive behavior and intelligence. Inspired by such intricate natural phenomena, Evolved Plastic Artificial Neural Networks (EPANNs) use simulated evolution in-silico to breed plastic neural networks with a large variety of dynamics, architectures, and plasticity rules: these artificial systems are composed of inputs, outputs, and plastic components that change in response to experiences in an environment. These systems may autonomously discover novel adaptive algorithms, and lead to hypotheses on the emergence of biological adaptation. EPANNs have seen considerable progress over the last two decades. Current scientific and technological advances in artificial neural networks are now setting the conditions for radically new approaches and results. In particular, the limitations of hand-designed networks could be overcome by more flexible and innovative solutions. This paper brings together a variety of inspiring ideas that define the field of EPANNs. The main methods and results are reviewed. Finally, new opportunities and developments are presented.
Online Representation Learning with Single and Multi-layer Hebbian Networks for Image Classification
Jan 29, 2018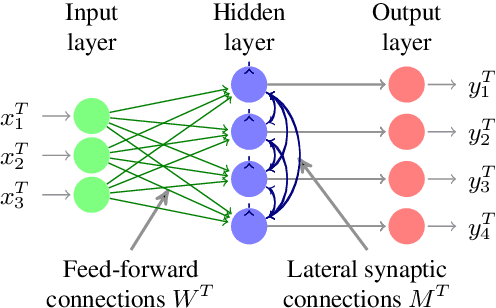
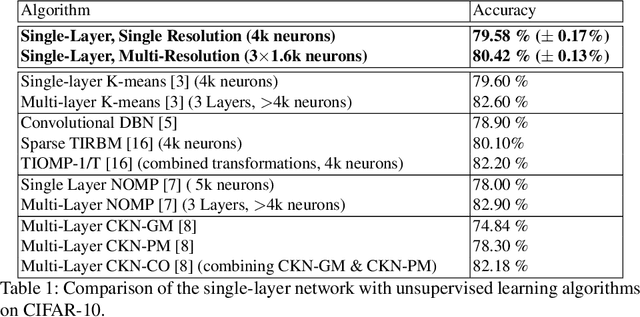
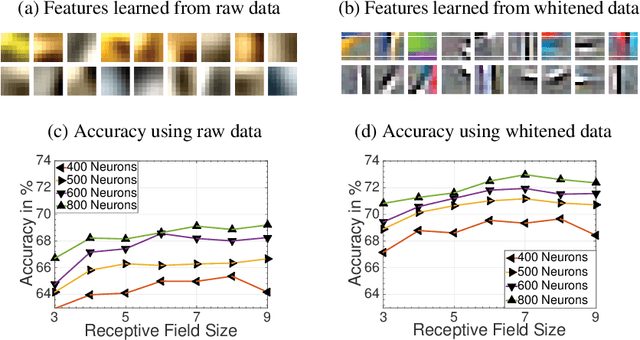
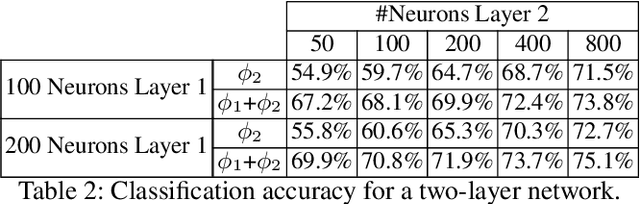
Unsupervised learning permits the development of algorithms that are able to adapt to a variety of different data sets using the same underlying rules thanks to the autonomous discovery of discriminating features during training. Recently, a new class of Hebbian-like and local unsupervised learning rules for neural networks have been developed that minimise a similarity matching cost-function. These have been shown to perform sparse representation learning. This study tests the effectiveness of one such learning rule for learning features from images. The rule implemented is derived from a nonnegative classical multidimensional scaling cost-function, and is applied to both single and multi-layer architectures. The features learned by the algorithm are then used as input to an SVM to test their effectiveness in classification on the established CIFAR-10 image dataset. The algorithm performs well in comparison to other unsupervised learning algorithms and multi-layer networks, thus suggesting its validity in the design of a new class of compact, online learning networks.
Short-term plasticity as cause-effect hypothesis testing in distal reward learning
Sep 09, 2014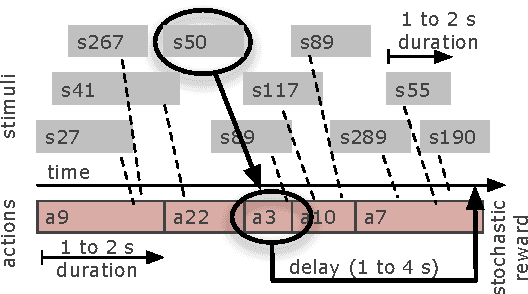
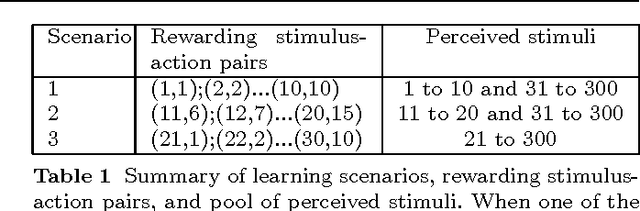
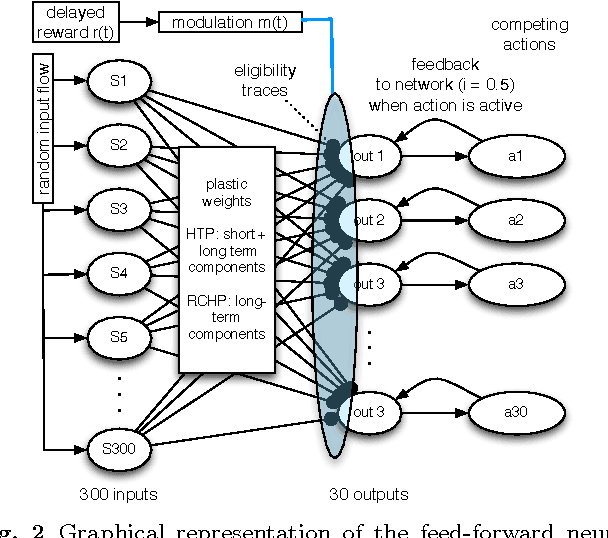
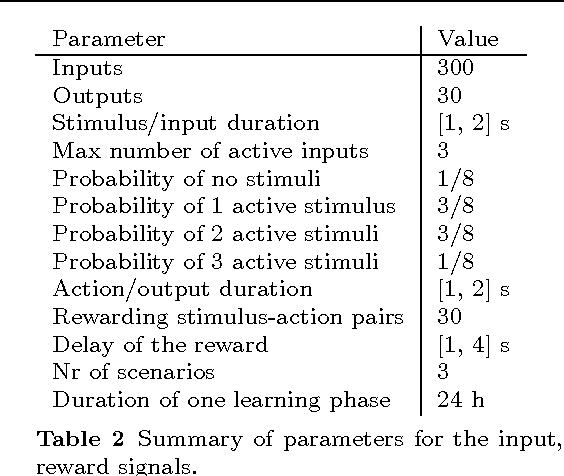
Asynchrony, overlaps and delays in sensory-motor signals introduce ambiguity as to which stimuli, actions, and rewards are causally related. Only the repetition of reward episodes helps distinguish true cause-effect relationships from coincidental occurrences. In the model proposed here, a novel plasticity rule employs short and long-term changes to evaluate hypotheses on cause-effect relationships. Transient weights represent hypotheses that are consolidated in long-term memory only when they consistently predict or cause future rewards. The main objective of the model is to preserve existing network topologies when learning with ambiguous information flows. Learning is also improved by biasing the exploration of the stimulus-response space towards actions that in the past occurred before rewards. The model indicates under which conditions beliefs can be consolidated in long-term memory, it suggests a solution to the plasticity-stability dilemma, and proposes an interpretation of the role of short-term plasticity.