 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning deformable linear object dynamics from a single trajectory
Jul 03, 2024



The manipulation of deformable linear objects (DLOs) via model-based control requires an accurate and computationally efficient dynamics model. Yet, data-driven DLO dynamics models require large training data sets while their predictions often do not generalize, whereas physics-based models rely on good approximations of physical phenomena and often lack accuracy. To address these challenges, we propose a physics-informed neural ODE capable of predicting agile movements with significantly less data and hyper-parameter tuning. In particular, we model DLOs as serial chains of rigid bodies interconnected by passive elastic joints in which interaction forces are predicted by neural networks. The proposed model accurately predicts the motion of an robotically-actuated aluminium rod and an elastic foam cylinder after being trained on only thirty seconds of data. The project code and data are available at: \url{https://tinyurl.com/neuralprba}
Finite element inspired networks: Learning physically-plausible deformable object dynamics from partial observations
Jul 16, 2023The accurate simulation of deformable linear object (DLO) dynamics is challenging if the task at hand requires a human-interpretable and data-efficient model that also yields fast predictions. To arrive at such model, we draw inspiration from the rigid finite element method (R-FEM) and model a DLO as a serial chain of rigid bodies whose internal state is unrolled through time by a dynamics network. As this state is not observed directly, the dynamics network is trained jointly with a physics-informed encoder mapping observed motion variables to the body chain's state. To encourage that the state acquires a physically meaningful representation, we leverage the forward kinematics (FK) of the underlying R-FEM model as a decoder. We demonstrate in a robot experiment that this architecture - being termed "Finite element inspired network" - forms an easy to handle, yet capable DLO dynamics model yielding physically interpretable predictions from partial observations. The project code is available at: \url{https://tinyurl.com/fei-networks}
Safe Imitation Learning of Nonlinear Model Predictive Control for Flexible Robots
Dec 06, 2022



Flexible robots may overcome the industry's major problems: safe human-robot collaboration and increased load-to-mass ratio. However, oscillations and high dimensional state space complicate the control of flexible robots. This work investigates nonlinear model predictive control (NMPC) of flexible robots -- for simultaneous planning and control -- modeled via the rigid finite element method. Although NMPC performs well in simulation, computational complexity prevents its deployment in practice. We show that imitation learning of NMPC with neural networks as function approximator can massively improve the computation time of the controller at the cost of slight performance loss and, more critically, loss of safety guarantees. We leverage a safety filter formulated as a simpler NMPC to recover safety guarantees. Experiments on a simulated three degrees of freedom flexible robot manipulator demonstrate that the average computational time of the proposed safe approximate NMPC controller is 3.6 ms while of the original NMPC is 11.8 ms. Fast and safe approximate NMPC might facilitate the industry's adoption of flexible robots and new solutions for similar problems, e.g., deformable object manipulation and soft robot control.
Vibration Free Flexible Object Handling with a Robot Manipulator Using Learning Control
Nov 20, 2022Many industries extensively use flexible materials. Effective approaches for handling flexible objects with a robot manipulator must address residual vibrations. Existing solutions rely on complex models, use additional instrumentation for sensing the vibrations, or do not exploit the repetitive nature of most industrial tasks. This paper develops an iterative learning control approach that jointly learns model parameters and residual dynamics using only the interoceptive sensors of the robot. The learned model is subsequently utilized to design optimal (PTP) trajectories that accounts for residual vibration, nonlinear kinematics of the manipulator and joint limits. We experimentally show that the proposed approach reduces the residual vibrations by an order of magnitude compared with optimal vibration suppression using the analytical model and threefold compared with the available state-of-the-art method. These results demonstrate that effective handling of a flexible object does not require neither complex models nor additional instrumentation.
An optimal open-loop strategy for handling a flexible beam with a robot manipulator
Oct 02, 2022
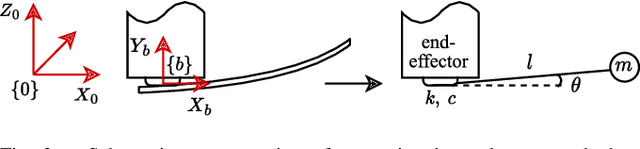
Fast and safe manipulation of flexible objects with a robot manipulator necessitates measures to cope with vibrations. Existing approaches either increase the task execution time or require complex models and/or additional instrumentation to measure vibrations. This paper develops a model-based method that overcomes these limitations. It relies on a simple pendulum-like model for modeling the beam, open-loop optimal control for suppressing vibrations, and does not require any exteroceptive sensors. We experimentally show that the proposed method drastically reduces residual vibrations -- at least 90% -- and outperforms the commonly used input shaping (IS) for the same execution time. Besides, our method can also execute the task faster than IS with a minor reduction in vibration suppression performance. The proposed method facilitates the development of new solutions to a wide range of tasks that involve dynamic manipulation of flexible objects.