 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreferential Multi-Objective Bayesian Optimization
Jun 20, 2024Preferential Bayesian optimization (PBO) is a framework for optimizing a decision-maker's latent preferences over available design choices. While preferences often involve multiple conflicting objectives, existing work in PBO assumes that preferences can be encoded by a single objective function. For example, in robotic assistive devices, technicians often attempt to maximize user comfort while simultaneously minimizing mechanical energy consumption for longer battery life. Similarly, in autonomous driving policy design, decision-makers wish to understand the trade-offs between multiple safety and performance attributes before committing to a policy. To address this gap, we propose the first framework for PBO with multiple objectives. Within this framework, we present dueling scalarized Thompson sampling (DSTS), a multi-objective generalization of the popular dueling Thompson algorithm, which may be of interest beyond the PBO setting. We evaluate DSTS across four synthetic test functions and two simulated exoskeleton personalization and driving policy design tasks, showing that it outperforms several benchmarks. Finally, we prove that DSTS is asymptotically consistent. As a direct consequence, this result provides, to our knowledge, the first convergence guarantee for dueling Thompson sampling in the PBO setting.
Dynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP
Jun 19, 2024



Realizing bipedal locomotion on humanoid robots with point feet is especially challenging due to their highly underactuated nature, high degrees of freedom, and hybrid dynamics resulting from impacts. With the goal of addressing this challenging problem, this paper develops a control framework for realizing dynamic locomotion and implements it on a novel point foot humanoid: ADAM. To this end, we close the loop between Hybrid Zero Dynamics (HZD) and Hybrid linear inverted pendulum (HLIP) based step length regulation. To leverage the full-order hybrid dynamics of the robot, walking gaits are first generated offline by utilizing HZD. These trajectories are stabilized online through the use of a HLIP based regulator. Finally, the planned trajectories are mapped into the full-order system using a task space controller incorporating inverse kinematics. The proposed method is verified through numerical simulations and hardware experiments on the humanoid robot ADAM marking the first humanoid point foot walking. Moreover, we experimentally demonstrate the robustness of the realized walking via the ability to track a desired reference speed, robustness to pushes, and locomotion on uneven terrain.
Constructive Safety-Critical Control: Synthesizing Control Barrier Functions for Partially Feedback Linearizable Systems
Jun 04, 2024Certifying the safety of nonlinear systems, through the lens of set invariance and control barrier functions (CBFs), offers a powerful method for controller synthesis, provided a CBF can be constructed. This paper draws connections between partial feedback linearization and CBF synthesis. We illustrate that when a control affine system is input-output linearizable with respect to a smooth output function, then, under mild regularity conditions, one may extend any safety constraint defined on the output to a CBF for the full-order dynamics. These more general results are specialized to robotic systems where the conditions required to synthesize CBFs simplify. The CBFs constructed from our approach are applied and verified in simulation and hardware experiments on a quadrotor.
Safety-critical Autonomous Inspection of Distillation Columns using Quadrupedal Robots Equipped with Roller Arms
Apr 16, 2024This paper proposes a comprehensive framework designed for the autonomous inspection of complex environments, with a specific focus on multi-tiered settings such as distillation column trays. Leveraging quadruped robots equipped with roller arms, and through the use of onboard perception, we integrate essential motion components including: locomotion, safe and dynamic transitions between trays, and intermediate motions that bridge a variety of motion primitives. Given the slippery and confined nature of column trays, it is critical to ensure safety of the robot during inspection, therefore we employ a safety filter and footstep re-planning based upon control barrier function representations of the environment. Our framework integrates all system components into a state machine encoding the developed safety-critical planning and control elements to guarantee safety-critical autonomy, enabling autonomous and safe navigation and inspection of distillation columns. Experimental validation in an environment, consisting of industrial-grade chemical distillation trays, highlights the effectiveness of our multi-layered architecture.
Flow-Based Synthesis of Reactive Tests for Discrete Decision-Making Systems with Temporal Logic Specifications
Apr 15, 2024



Designing tests to evaluate if a given autonomous system satisfies complex specifications is challenging due to the complexity of these systems. This work proposes a flow-based approach for reactive test synthesis from temporal logic specifications, enabling the synthesis of test environments consisting of static and reactive obstacles and dynamic test agents. The temporal logic specifications describe desired test behavior, including system requirements as well as a test objective that is not revealed to the system. The synthesized test strategy places restrictions on system actions in reaction to the system state. The tests are minimally restrictive and accomplish the test objective while ensuring realizability of the system's objective without aiding it (semi-cooperative setting). Automata theory and flow networks are leveraged to formulate a mixed-integer linear program (MILP) to synthesize the test strategy. For a dynamic test agent, the agent strategy is synthesized for a GR(1) specification constructed from the solution of the MILP. If the specification is unrealizable by the dynamics of the test agent, a counterexample-guided approach is used to resolve the MILP until a strategy is found. This flow-based, reactive test synthesis is conducted offline and is agnostic to the system controller. Finally, the resulting test strategy is demonstrated in simulation and experimentally on a pair of quadrupedal robots for a variety of specifications.
Risk-Aware Robotics: Tail Risk Measures in Planning, Control, and Verification
Mar 27, 2024



The need for a systematic approach to risk assessment has increased in recent years due to the ubiquity of autonomous systems that alter our day-to-day experiences and their need for safety, e.g., for self-driving vehicles, mobile service robots, and bipedal robots. These systems are expected to function safely in unpredictable environments and interact seamlessly with humans, whose behavior is notably challenging to forecast. We present a survey of risk-aware methodologies for autonomous systems. We adopt a contemporary risk-aware approach to mitigate rare and detrimental outcomes by advocating the use of tail risk measures, a concept borrowed from financial literature. This survey will introduce these measures and explain their relevance in the context of robotic systems for planning, control, and verification applications.
A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems
Mar 26, 2024We present a multi-rate control architecture that leverages fundamental properties of differential flatness to synthesize controllers for safety-critical nonlinear dynamical systems. We propose a two-layer architecture, where the high-level generates reference trajectories using a linear Model Predictive Controller, and the low-level tracks this reference using a feedback controller. The novelty lies in how we couple these layers, to achieve formal guarantees on recursive feasibility of the MPC problem, and safety of the nonlinear system. Furthermore, using differential flatness, we provide a constructive means to synthesize the multi-rate controller, thereby removing the need to search for suitable Lyapunov or barrier functions, or to approximately linearize/discretize nonlinear dynamics. We show the synthesized controller is a convex optimization problem, making it amenable to real-time implementations. The method is demonstrated experimentally on a ground rover and a quadruped robotic system.
* 6 pages, 3 figures, accepted at IEEE Control Systems Letters 2021
Data-Driven Predictive Control for Robust Exoskeleton Locomotion
Mar 23, 2024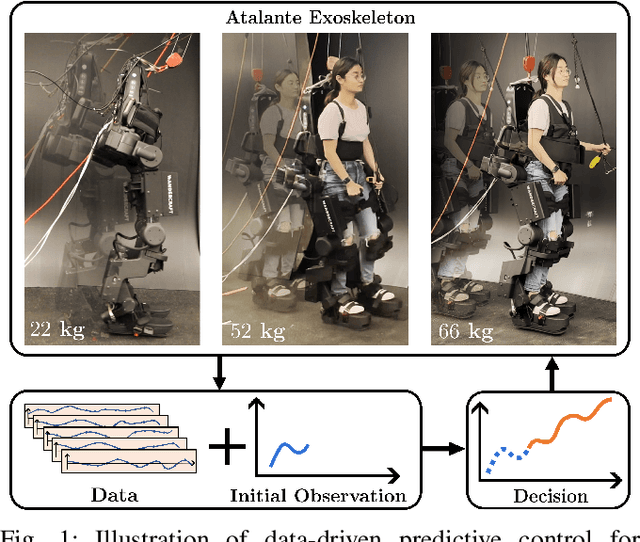
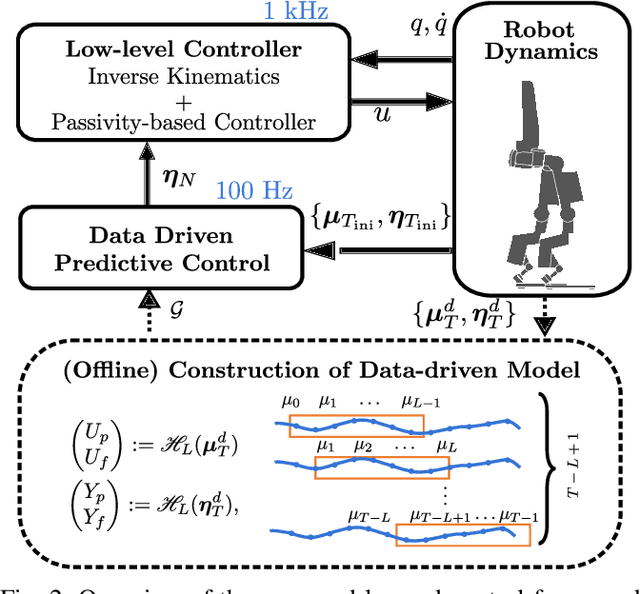
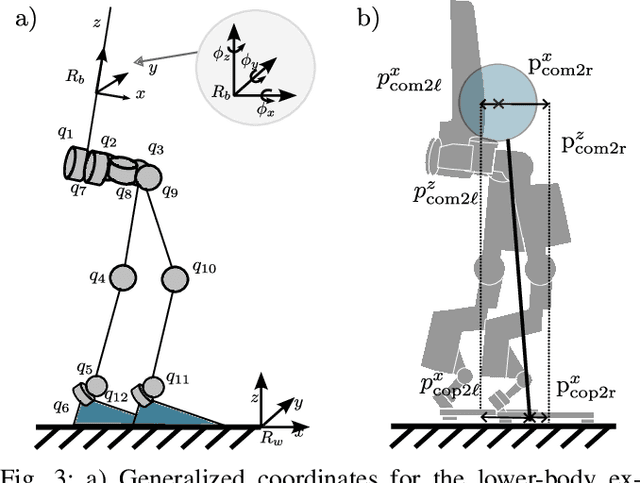
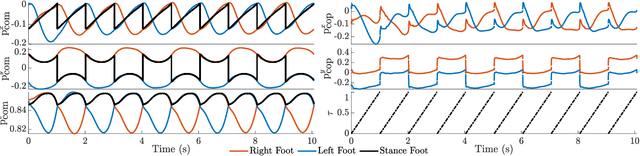
Exoskeleton locomotion must be robust while being adaptive to different users with and without payloads. To address these challenges, this work introduces a data-driven predictive control (DDPC) framework to synthesize walking gaits for lower-body exoskeletons, employing Hankel matrices and a state transition matrix for its data-driven model. The proposed approach leverages DDPC through a multi-layer architecture. At the top layer, DDPC serves as a planner employing Hankel matrices and a state transition matrix to generate a data-driven model that can learn and adapt to varying users and payloads. At the lower layer, our method incorporates inverse kinematics and passivity-based control to map the planned trajectory from DDPC into the full-order states of the lower-body exoskeleton. We validate the effectiveness of this approach through numerical simulations and hardware experiments conducted on the Atalante lower-body exoskeleton with different payloads. Moreover, we conducted a comparative analysis against the model predictive control (MPC) framework based on the reduced-order linear inverted pendulum (LIP) model. Through this comparison, the paper demonstrates that DDPC enables robust bipedal walking at various velocities while accounting for model uncertainties and unknown perturbations.
Safety-Critical Control for Autonomous Systems: Control Barrier Functions via Reduced-Order Models
Mar 14, 2024



Modern autonomous systems, such as flying, legged, and wheeled robots, are generally characterized by high-dimensional nonlinear dynamics, which presents challenges for model-based safety-critical control design. Motivated by the success of reduced-order models in robotics, this paper presents a tutorial on constructive safety-critical control via reduced-order models and control barrier functions (CBFs). To this end, we provide a unified formulation of techniques in the literature that share a common foundation of constructing CBFs for complex systems from CBFs for much simpler systems. Such ideas are illustrated through formal results, simple numerical examples, and case studies of real-world systems to which these techniques have been experimentally applied.
Rollover Prevention for Mobile Robots with Control Barrier Functions: Differentiator-Based Adaptation and Projection-to-State Safety
Mar 13, 2024

This paper develops rollover prevention guarantees for mobile robots using control barrier function (CBF) theory, and demonstrates these formal results experimentally. To this end, we consider a safety measure based on the zero moment point to provide conditions on the control input through the lens of CBFs. However, these conditions depend on time-varying and noisy parameters. To address this, we present a differentiator-based safety-critical controller that estimates these parameters and pairs Input-to-State Stable (ISS) differentiator dynamics with CBFs to achieve rigorous guarantees of safety. Additionally, to ensure safety in the presence of disturbance, we utilize a time-varying extension of Projection-to-State Safety (PSSf). The effectiveness of the proposed method is demonstrated through experiments on a tracked robot with a rollover potential on steep slopes.