 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Urban Crowdsensing using Social Media: An Empirical Study on Transformer and Recurrent Neural Networks
Dec 05, 2020
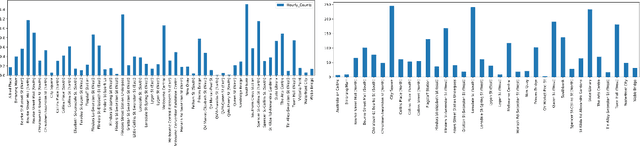
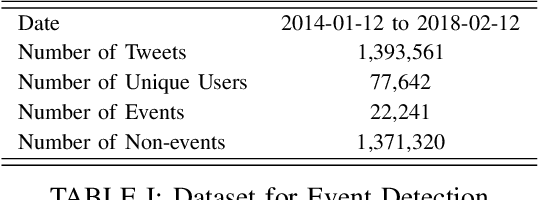
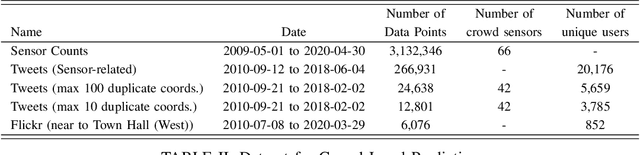
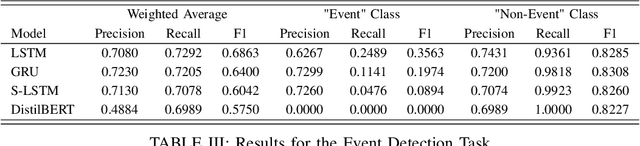
An important aspect of urban planning is understanding crowd levels at various locations, which typically require the use of physical sensors. Such sensors are potentially costly and time consuming to implement on a large scale. To address this issue, we utilize publicly available social media datasets and use them as the basis for two urban sensing problems, namely event detection and crowd level prediction. One main contribution of this work is our collected dataset from Twitter and Flickr, alongside ground truth events. We demonstrate the usefulness of this dataset with two preliminary supervised learning approaches: firstly, a series of neural network models to determine if a social media post is related to an event and secondly a regression model using social media post counts to predict actual crowd levels. We discuss preliminary results from these tasks and highlight some challenges.
A Review on Deep Learning in UAV Remote Sensing
Jan 29, 2021

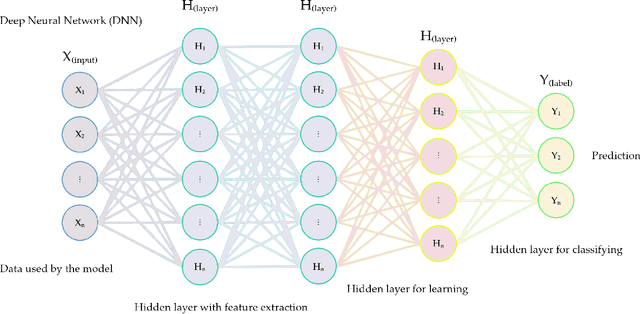
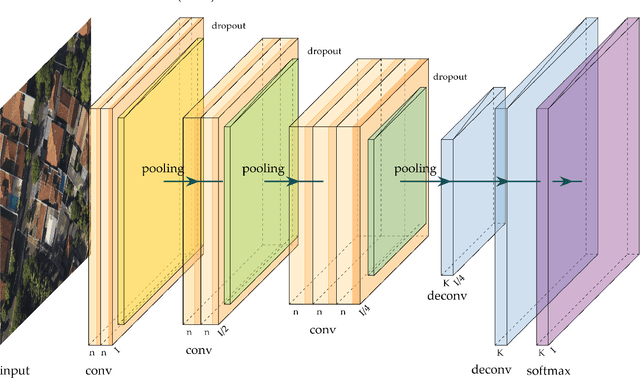
Deep Neural Networks (DNNs) learn representation from data with an impressive capability, and brought important breakthroughs for processing images, time-series, natural language, audio, video, and many others. In the remote sensing field, surveys and literature revisions specifically involving DNNs algorithms' applications have been conducted in an attempt to summarize the amount of information produced in its subfields. Recently, Unmanned Aerial Vehicles (UAV) based applications have dominated aerial sensing research. However, a literature revision that combines both "deep learning" and "UAV remote sensing" thematics has not yet been conducted. The motivation for our work was to present a comprehensive review of the fundamentals of Deep Learning (DL) applied in UAV-based imagery. We focused mainly on describing classification and regression techniques used in recent applications with UAV-acquired data. For that, a total of 232 papers published in international scientific journal databases was examined. We gathered the published material and evaluated their characteristics regarding application, sensor, and technique used. We relate how DL presents promising results and has the potential for processing tasks associated with UAV-based image data. Lastly, we project future perspectives, commentating on prominent DL paths to be explored in the UAV remote sensing field. Our revision consists of a friendly-approach to introduce, commentate, and summarize the state-of-the-art in UAV-based image applications with DNNs algorithms in diverse subfields of remote sensing, grouping it in the environmental, urban, and agricultural contexts.
uBAM: Unsupervised Behavior Analysis and Magnification using Deep Learning
Dec 16, 2020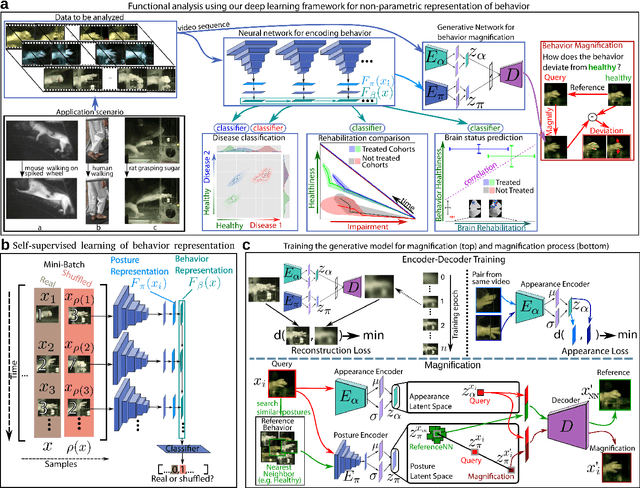
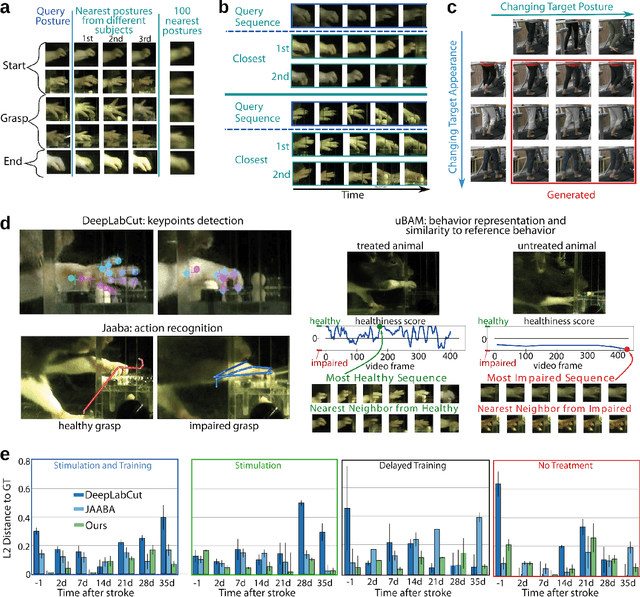
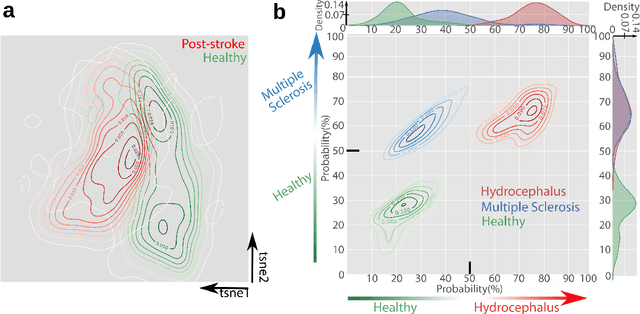
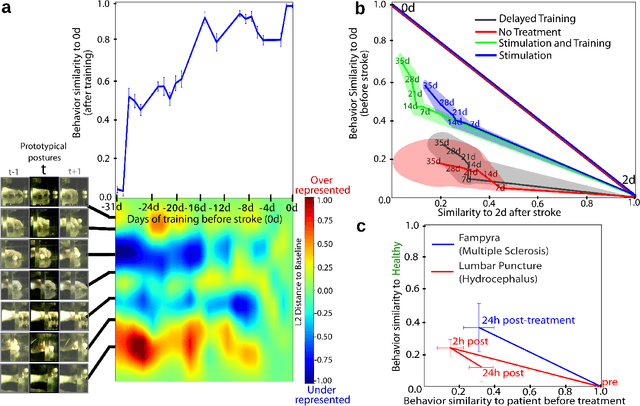
Motor behavior analysis is essential to biomedical research and clinical diagnostics as it provides a non-invasive strategy for identifying motor impairment and its change caused by interventions. State-of-the-art instrumented movement analysis is time- and cost-intensive, since it requires placing physical or virtual markers. Besides the effort required for marking keypoints or annotations necessary for training or finetuning a detector, users need to know the interesting behavior beforehand to provide meaningful keypoints. We introduce uBAM, a novel, automatic deep learning algorithm for behavior analysis by discovering and magnifying deviations. We propose an unsupervised learning of posture and behavior representations that enable an objective behavior comparison across subjects. A generative model with novel disentanglement of appearance and behavior magnifies subtle behavior differences across subjects directly in a video without requiring a detour via keypoints or annotations. Evaluations on rodents and human patients with neurological diseases demonstrate the wide applicability of our approach.
BlockFLA: Accountable Federated Learning via Hybrid Blockchain Architecture
Oct 14, 2020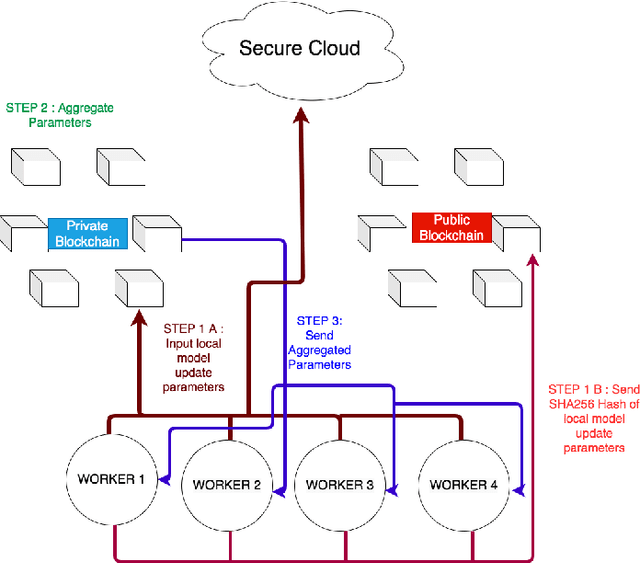
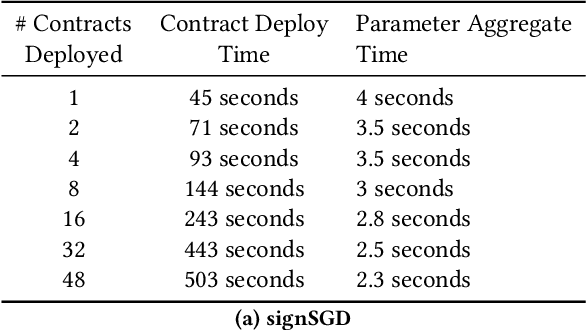
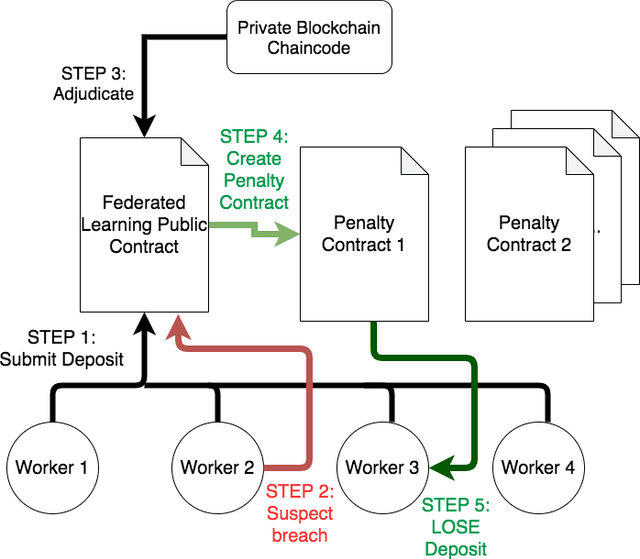
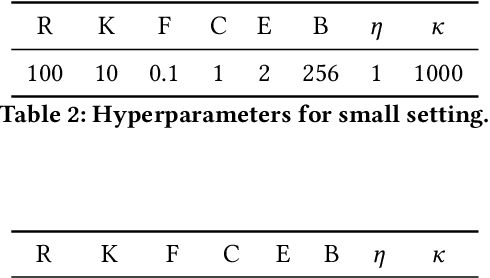
Federated Learning (FL) is a distributed, and decentralized machine learning protocol. By executing FL, a set of agents can jointly train a model without sharing their datasets with each other, or a third-party. This makes FL particularly suitable for settings where data privacy is desired. At the same time, concealing training data gives attackers an opportunity to inject backdoors into the trained model. It has been shown that an attacker can inject backdoors to the trained model during FL, and then can leverage the backdoor to make the model misclassify later. Several works tried to alleviate this threat by designing robust aggregation functions. However, given more sophisticated attacks are developed over time, which by-pass the existing defenses, we approach this problem from a complementary angle in this work. Particularly, we aim to discourage backdoor attacks by detecting, and punishing the attackers, possibly after the end of training phase. To this end, we develop a hybrid blockchain-based FL framework that uses smart contracts to automatically detect, and punish the attackers via monetary penalties. Our framework is general in the sense that, any aggregation function, and any attacker detection algorithm can be plugged into it. We conduct experiments to demonstrate that our framework preserves the communication-efficient nature of FL, and provide empirical results to illustrate that it can successfully penalize attackers by leveraging our novel attacker detection algorithm.
Learning Quantities of Interest from Dynamical Systems for Observation-Consistent Inversion
Sep 15, 2020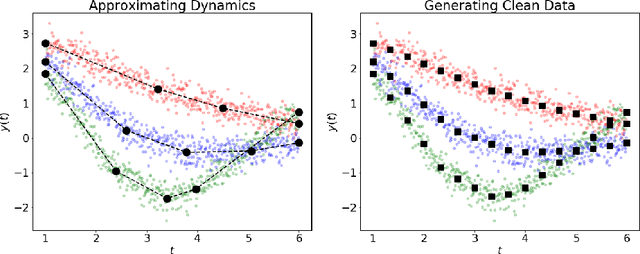

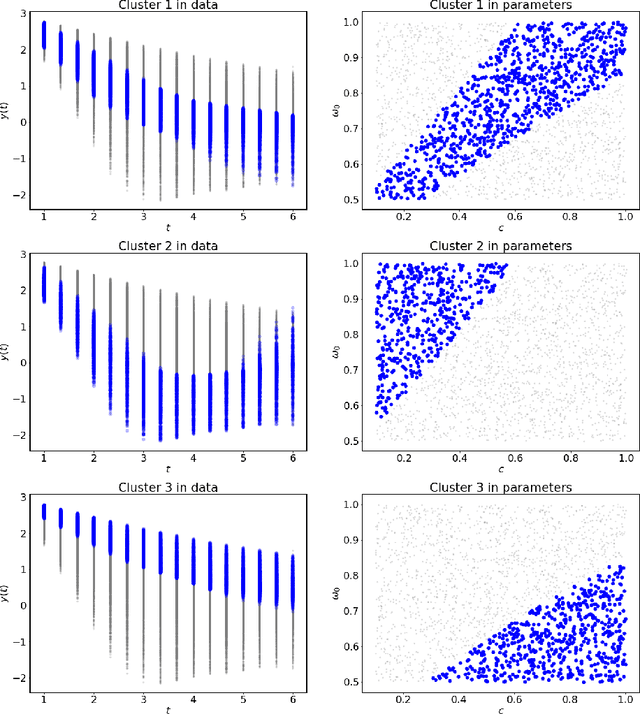
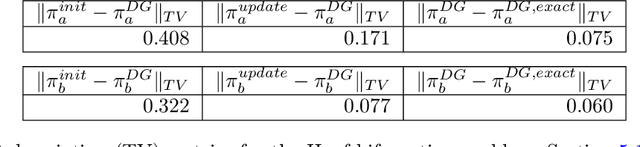
Dynamical systems arise in a wide variety of mathematical models from science and engineering. A common challenge is to quantify uncertainties on model inputs (parameters) that correspond to a quantitative characterization of uncertainties on observable Quantities of Interest (QoI). To this end, we consider a stochastic inverse problem (SIP) with a solution described by a pullback probability measure. We call this an observation-consistent solution, as its subsequent push-forward through the QoI map matches the observed probability distribution on model outputs. A distinction is made between QoI useful for solving the SIP and arbitrary model output data. In dynamical systems, model output data are often given as a series of state variable responses recorded over a particular time window. Consequently, the dimension of output data can easily exceed $\mathcal{O}(1E4)$ or more due to the frequency of observations, and the correct choice or construction of a QoI from this data is not self-evident. We present a new framework, Learning Uncertain Quantities (LUQ), that facilitates the tractable solution of SIPs for dynamical systems. Given ensembles of predicted (simulated) time series and (noisy) observed data, LUQ provides routines for filtering data, unsupervised learning of the underlying dynamics, classifying observations, and feature extraction to learn the QoI map. Subsequently, time series data are transformed into samples of the underlying predicted and observed distributions associated with the QoI so that solutions to the SIP are computable. Following the introduction and demonstration of LUQ, numerical results from several SIPs are presented for a variety of dynamical systems arising in the life and physical sciences. For scientific reproducibility, we provide links to our Python implementation of LUQ and to all data and scripts required to reproduce the results in this manuscript.
Explainable AI and Adoption of Algorithmic Advisors: an Experimental Study
Jan 05, 2021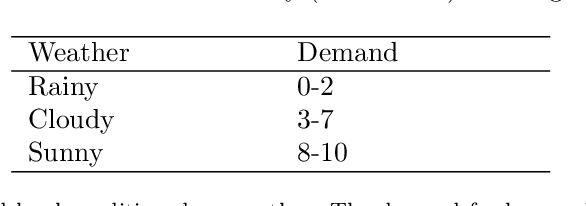
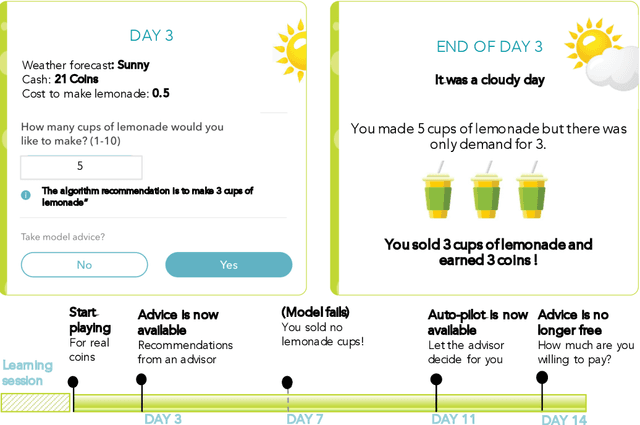
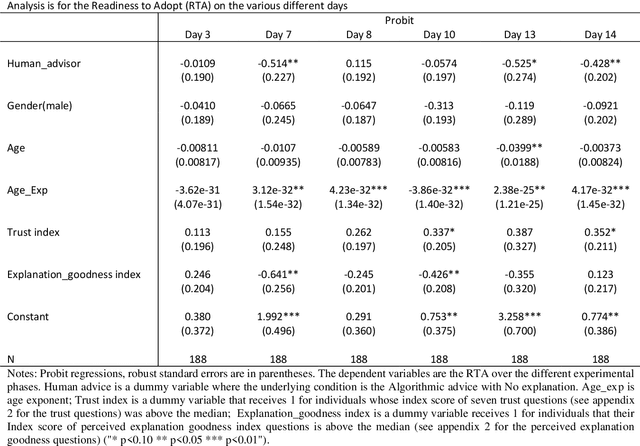
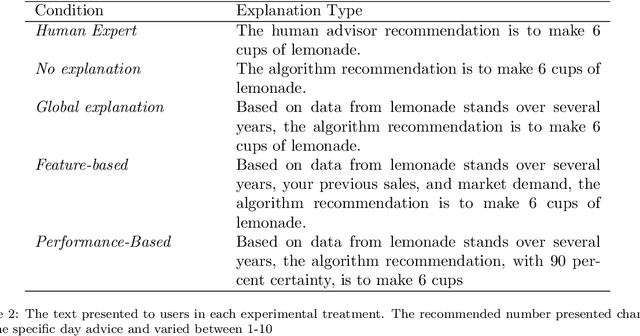
Machine learning is becoming a commonplace part of our technological experience. The notion of explainable AI (XAI) is attractive when regulatory or usability considerations necessitate the ability to back decisions with a coherent explanation. A large body of research has addressed algorithmic methods of XAI, but it is still unclear how to determine what is best suited to create human cooperation and adoption of automatic systems. Here we develop an experimental methodology where participants play a web-based game, during which they receive advice from either a human or algorithmic advisor, accompanied with explanations that vary in nature between experimental conditions. We use a reference-dependent decision-making framework, evaluate the game results over time, and in various key situations, to determine whether the different types of explanations affect the readiness to adopt, willingness to pay and trust a financial AI consultant. We find that the types of explanations that promotes adoption during first encounter differ from those that are most successful following failure or when cost is involved. Furthermore, participants are willing to pay more for AI-advice that includes explanations. These results add to the literature on the importance of XAI for algorithmic adoption and trust.
The Benefit of the Doubt: Uncertainty Aware Sensing for Edge Computing Platforms
Feb 11, 2021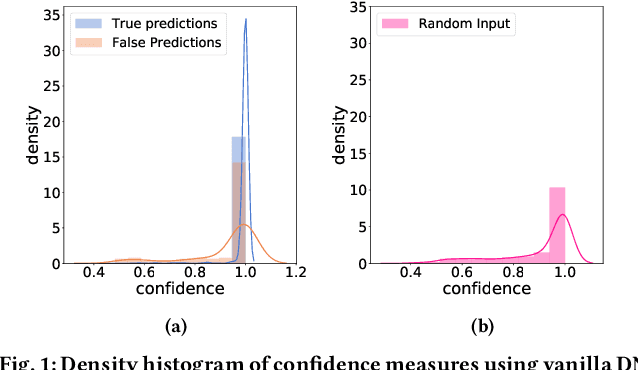

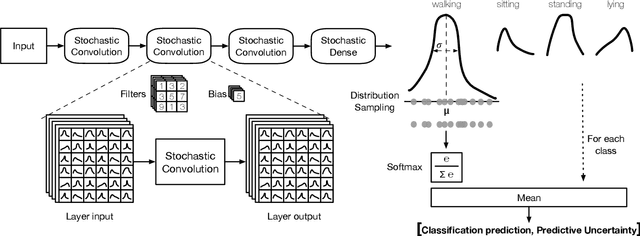
Neural networks (NNs) lack measures of "reliability" estimation that would enable reasoning over their predictions. Despite the vital importance, especially in areas of human well-being and health, state-of-the-art uncertainty estimation techniques are computationally expensive when applied to resource-constrained devices. We propose an efficient framework for predictive uncertainty estimation in NNs deployed on embedded edge systems with no need for fine-tuning or re-training strategies. To meet the energy and latency requirements of these embedded platforms the framework is built from the ground up to provide predictive uncertainty based only on one forward pass and a negligible amount of additional matrix multiplications with theoretically proven correctness. Our aim is to enable already trained deep learning models to generate uncertainty estimates on resource-limited devices at inference time focusing on classification tasks. This framework is founded on theoretical developments casting dropout training as approximate inference in Bayesian NNs. Our layerwise distribution approximation to the convolution layer cascades through the network, providing uncertainty estimates in one single run which ensures minimal overhead, especially compared with uncertainty techniques that require multiple forwards passes and an equal linear rise in energy and latency requirements making them unsuitable in practice. We demonstrate that it yields better performance and flexibility over previous work based on multilayer perceptrons to obtain uncertainty estimates. Our evaluation with mobile applications datasets shows that our approach not only obtains robust and accurate uncertainty estimations but also outperforms state-of-the-art methods in terms of systems performance, reducing energy consumption (up to 28x), keeping the memory overhead at a minimum while still improving accuracy (up to 16%).
Black-Box Control for Linear Dynamical Systems
Jul 13, 2020We consider the problem of controlling an unknown linear time-invariant dynamical system from a single chain of black-box interactions, and with no access to resets or offline simulation. Under the assumption that the system is controllable, we give the first efficient algorithm that is capable of attaining sublinear regret in a single trajectory under the setting of online nonstochastic control. We give finite-time regret bound of our algorithm, as well as a nearly-matching lower bound that shows this regret to be almost best-attainable by any algorithm.
Lorenz Trajectories Prediction: Travel Through Time
Mar 18, 2019
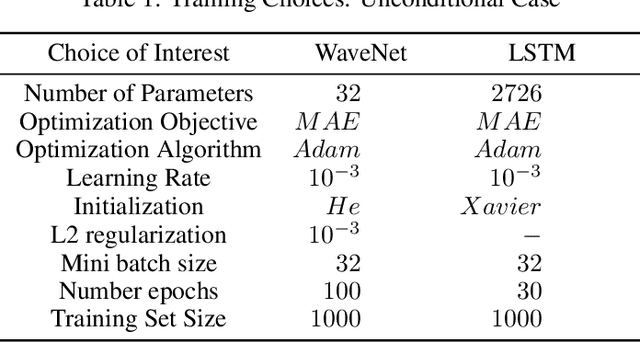
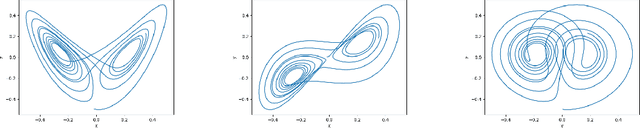
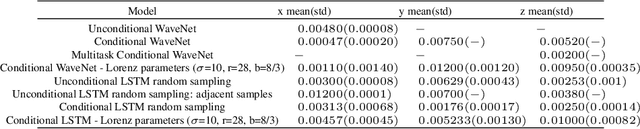
In this article the Lorenz dynamical system is revived and revisited and the current state of the art results for one step ahead forecasting for the Lorenz trajectories are published. The article is a reflection upon the evolution of neural networks with regards to the prediction performance on this canonical task.
ArticulatedFusion: Real-time Reconstruction of Motion, Geometry and Segmentation Using a Single Depth Camera
Jul 19, 2018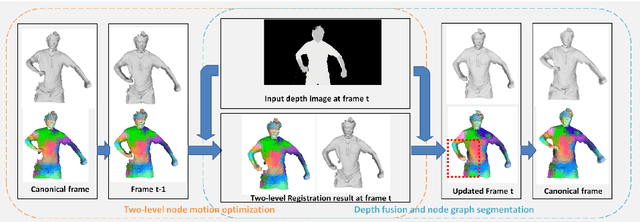
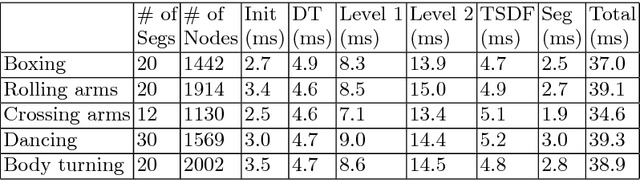
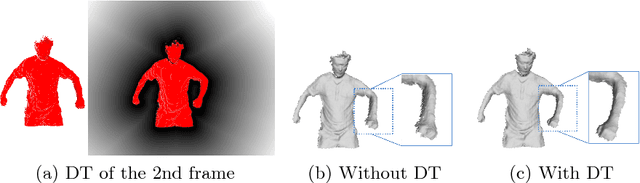
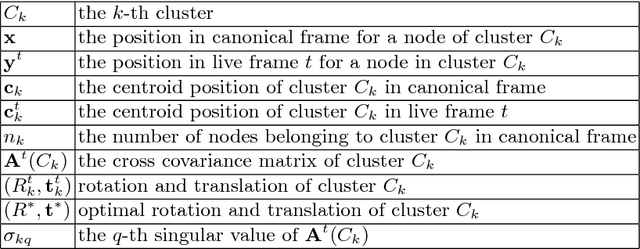
This paper proposes a real-time dynamic scene reconstruction method capable of reproducing the motion, geometry, and segmentation simultaneously given live depth stream from a single RGB-D camera. Our approach fuses geometry frame by frame and uses a segmentation-enhanced node graph structure to drive the deformation of geometry in registration step. A two-level node motion optimization is proposed. The optimization space of node motions and the range of physically-plausible deformations are largely reduced by taking advantage of the articulated motion prior, which is solved by an efficient node graph segmentation method. Compared to previous fusion-based dynamic scene reconstruction methods, our experiments show robust and improved reconstruction results for tangential and occluded motions.