 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Closed-Form Second-Order Partial Derivatives of Rigid-Body Inverse Dynamics
Mar 03, 2022
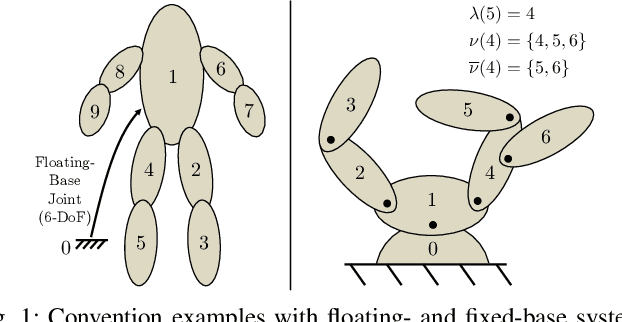
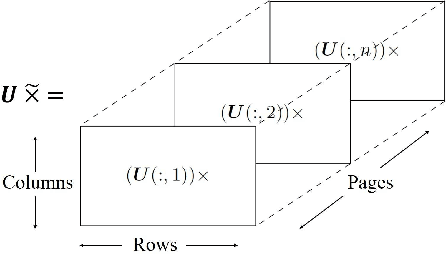
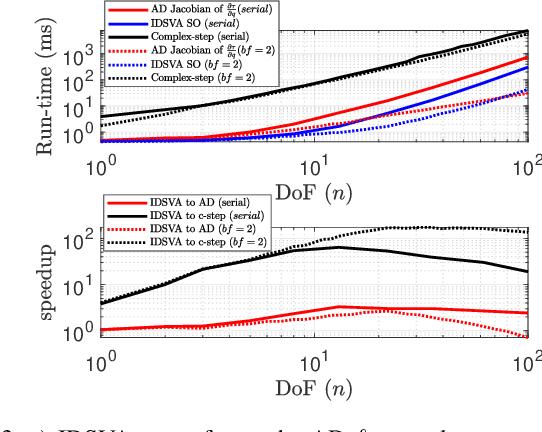
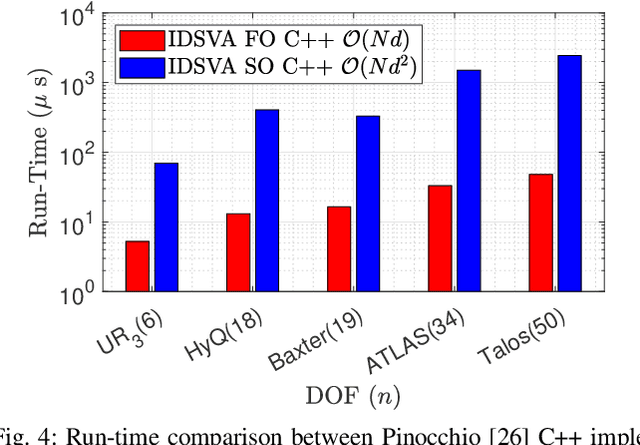
Optimization-based control methods for robots often rely on first-order dynamics approximation methods like in iLQR. Using second-order approximations of the dynamics is expensive due to the costly second-order partial derivatives of dynamics with respect to the state and control. Current approaches for calculating these derivatives typically use automatic differentiation (AD) and chain-rule accumulation or finite-difference. In this paper, for the first time, we present closed-form analytical second-order partial derivatives of inverse dynamics for rigid-body systems with floating base and multi-DoF joints. A new extension of spatial vector algebra is proposed that enables the analysis. A recursive $\mathcal{O}(Nd^2)$ algorithm is also provided where $N$ is the number of bodies and $d$ is the depth of the kinematic tree. A comparison with AD in CasADi shows speedups of 1.5-3$\times$ for serial kinematic trees with $N> 5$, and a C++ implementation shows runtimes of $\approx$400$\mu s$ for a quadruped.
Concentration Network for Reinforcement Learning of Large-Scale Multi-Agent Systems
Mar 12, 2022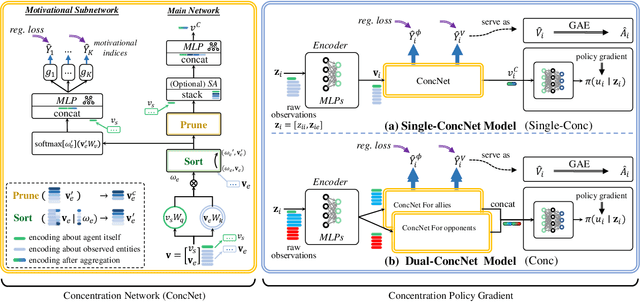
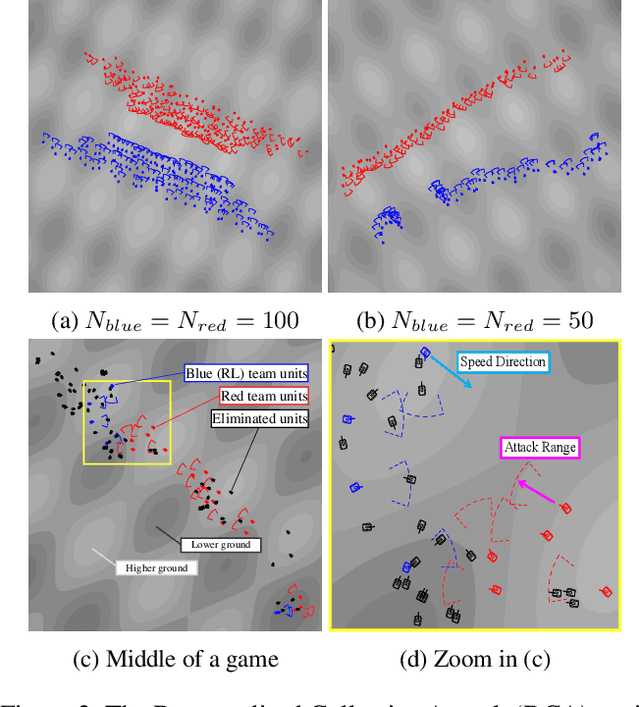
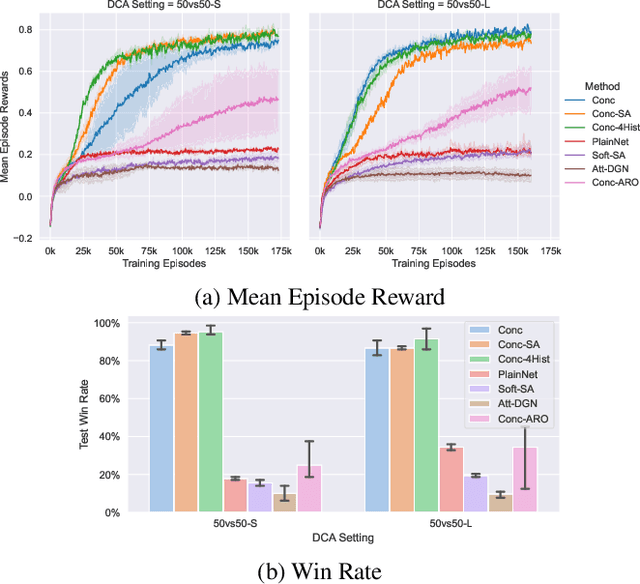
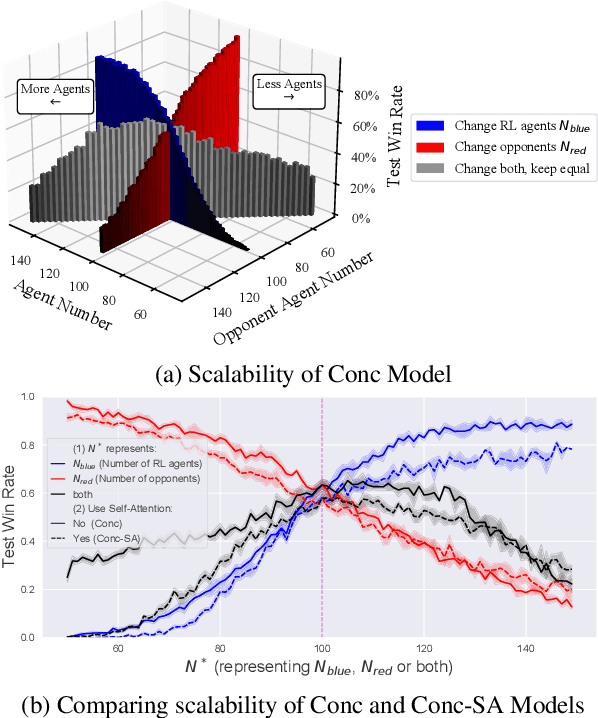
When dealing with a series of imminent issues, humans can naturally concentrate on a subset of these concerning issues by prioritizing them according to their contributions to motivational indices, e.g., the probability of winning a game. This idea of concentration offers insights into reinforcement learning of sophisticated Large-scale Multi-Agent Systems (LMAS) participated by hundreds of agents. In such an LMAS, each agent receives a long series of entity observations at each step, which can overwhelm existing aggregation networks such as graph attention networks and cause inefficiency. In this paper, we propose a concentration network called ConcNet. First, ConcNet scores the observed entities considering several motivational indices, e.g., expected survival time and state value of the agents, and then ranks, prunes, and aggregates the encodings of observed entities to extract features. Second, distinct from the well-known attention mechanism, ConcNet has a unique motivational subnetwork to explicitly consider the motivational indices when scoring the observed entities. Furthermore, we present a concentration policy gradient architecture that can learn effective policies in LMAS from scratch. Extensive experiments demonstrate that the presented architecture has excellent scalability and flexibility, and significantly outperforms existing methods on LMAS benchmarks.
Deep-CNN based Robotic Multi-Class Under-Canopy Weed Control in Precision Farming
Dec 28, 2021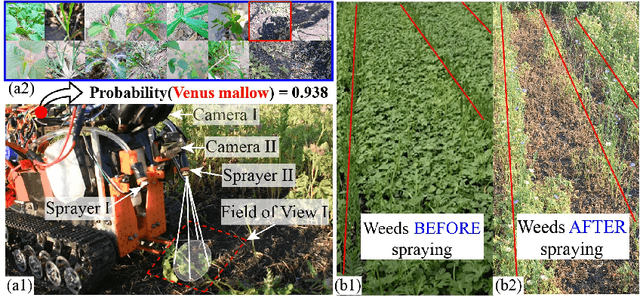
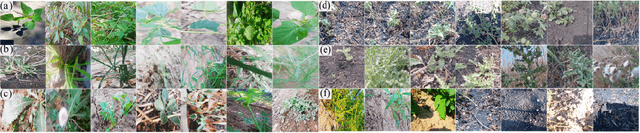
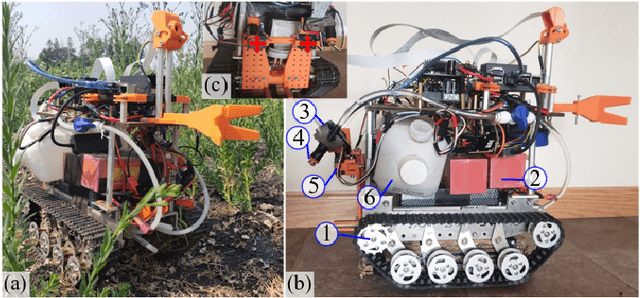
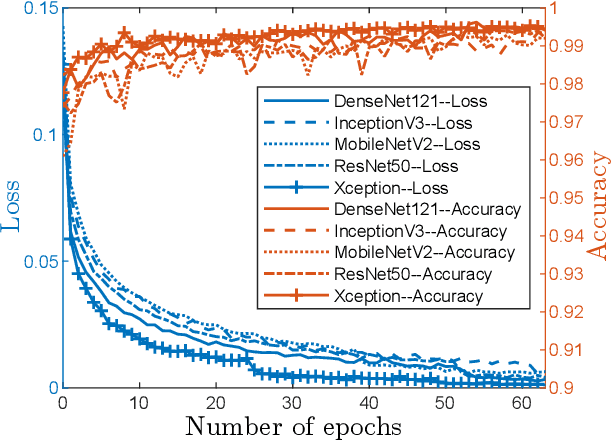
Smart weeding systems to perform plant-specific operations can contribute to the sustainability of agriculture and the environment. Despite monumental advances in autonomous robotic technologies for precision weed management in recent years, work on under-canopy weeding in fields is yet to be realized. A prerequisite of such systems is reliable detection and classification of weeds to avoid mistakenly spraying and, thus, damaging the surrounding plants. Real-time multi-class weed identification enables species-specific treatment of weeds and significantly reduces the amount of herbicide use. Here, our first contribution is the first adequately large realistic image dataset \textit{AIWeeds} (one/multiple kinds of weeds in one image), a library of about 10,000 annotated images of flax, and the 14 most common weeds in fields and gardens taken from 20 different locations in North Dakota, California, and Central China. Second, we provide a full pipeline from model training with maximum efficiency to deploying the TensorRT-optimized model onto a single board computer. Based on \textit{AIWeeds} and the pipeline, we present a baseline for classification performance using five benchmark CNN models. Among them, MobileNetV2, with both the shortest inference time and lowest memory consumption, is the qualified candidate for real-time applications. Finally, we deploy MobileNetV2 onto our own compact autonomous robot \textit{SAMBot} for real-time weed detection. The 90\% test accuracy realized in previously unseen scenes in flax fields (with a row spacing of 0.2-0.3 m), with crops and weeds, distortion, blur, and shadows, is a milestone towards precision weed control in the real world. We have publicly released the dataset and code to generate the results at \url{https://github.com/StructuresComp/Multi-class-Weed-Classification}.
Weighted Random Cut Forest Algorithm for Anomaly Detections
Feb 01, 2022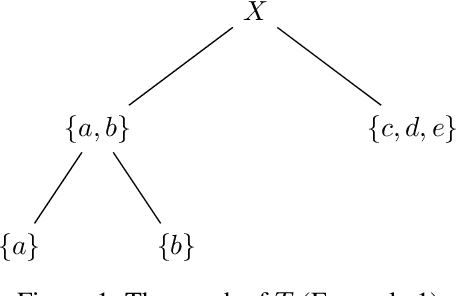

Random cut forest (RCF) algorithms have been developed for anomaly detection, particularly for the anomaly detection in time-series data. The RCF algorithm is the improved version of the isolation forest algorithm. Unlike the isolation forest algorithm, the RCF algorithm has the power of determining whether the real-time input has anomaly by inserting the input in the constructed tree network. There have been developed various RCF algorithms including Robust RCF (RRCF) with which the cutting procedure is adaptively chosen probabilistically. RRCF shows better performance compared to the isolation forest as the cutting dimension is decided based on the geometric range of the data. The overall data structure is, however, not considered in the adaptive cutting algorithm with the RRCF. In this paper, we propose a new RCF, so-called the weighted RCF (WRCF). In order to introduce the WRCF, we first introduce a new geometric measure, i.e., a \textit{density measure} which is crucial for the construction of the WRCF. We provide various mathematical properties of the density measure. The proposed WRCF also cuts the tree network adaptively, but with consideration of the denseness of the data. The proposed method is more efficient when the data is structured and achieves the desired anomaly score more rapidly than the RRCF. We provide theorems that prove our claims with numerical examples.
Successful Recovery of an Observed Meteorite Fall Using Drones and Machine Learning
Mar 03, 2022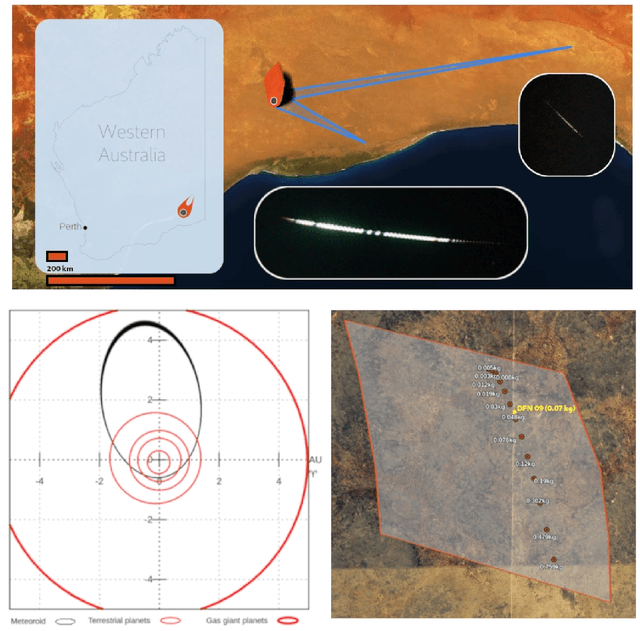
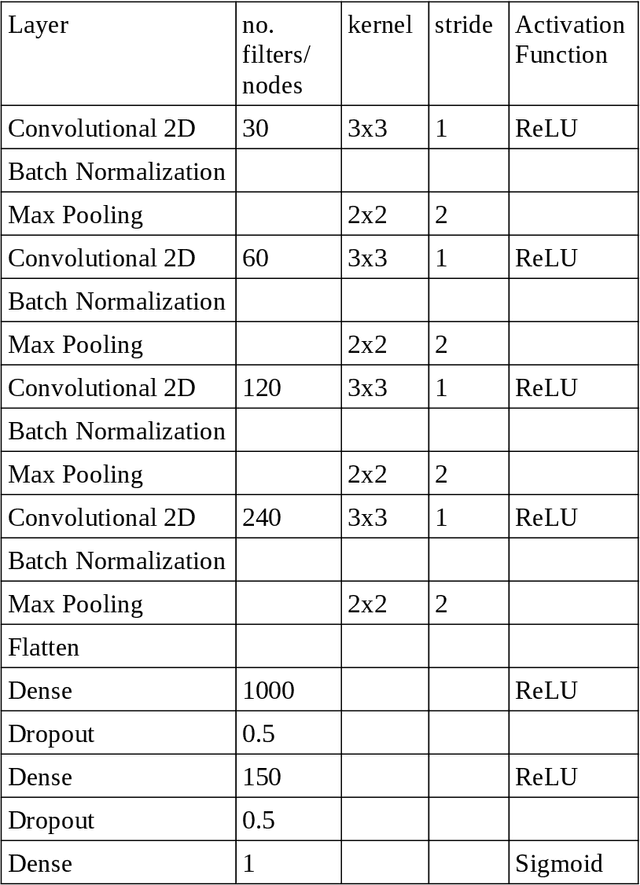
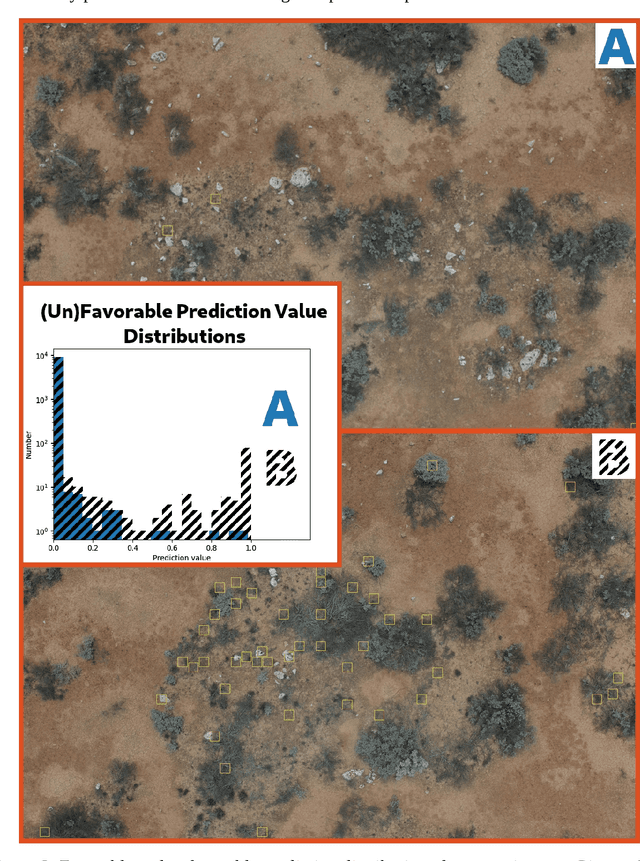
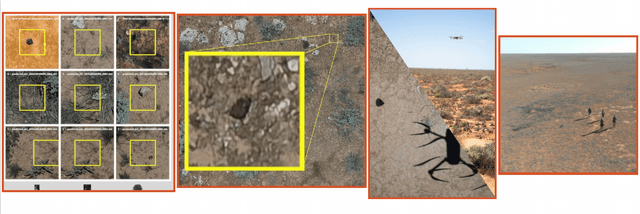
We report the first-time recovery of a fresh meteorite fall using a drone and a machine learning algorithm. A fireball on the 1st April 2021 was observed over Western Australia by the Desert Fireball Network, for which a fall area was calculated for the predicted surviving mass. A search team arrived on site and surveyed 5.1 km2 area over a 4-day period. A convolutional neural network, trained on previously-recovered meteorites with fusion crusts, processed the images on our field computer after each flight. meteorite candidates identified by the algorithm were sorted by team members using two user interfaces to eliminate false positives. Surviving candidates were revisited with a smaller drone, and imaged in higher resolution, before being eliminated or finally being visited in-person. The 70 g meteorite was recovered within 50 m of the calculated fall line using, demonstrating the effectiveness of this methodology which will facilitate the efficient collection of many more observed meteorite falls.
Real-time Prediction for Mechanical Ventilation in COVID-19 Patients using A Multi-task Gaussian Process Multi-objective Self-attention Network
Feb 01, 2021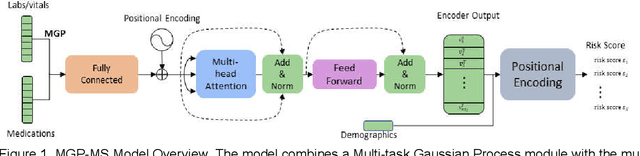
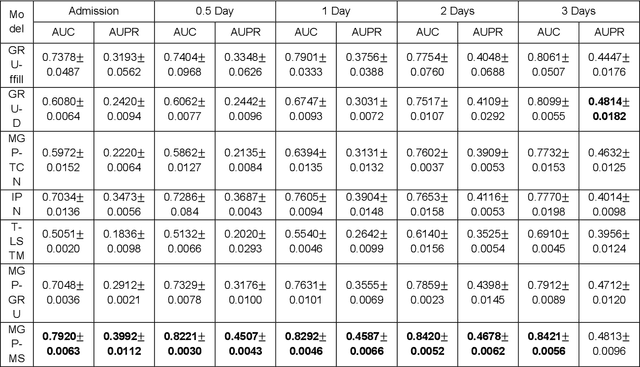
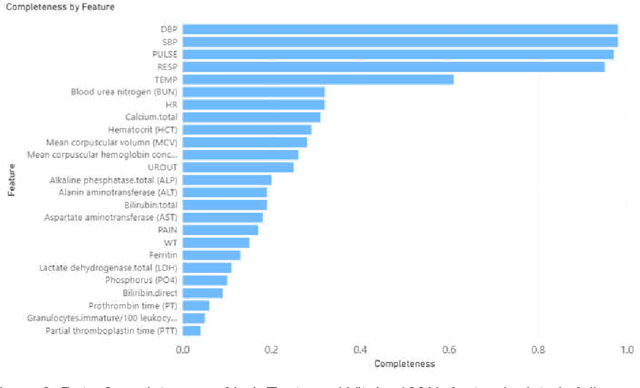
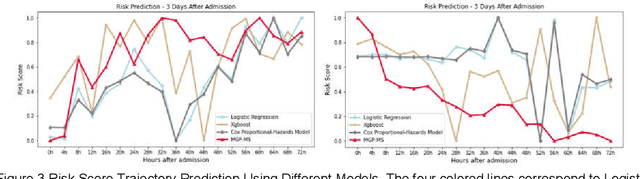
We propose a robust in-time predictor for in-hospital COVID-19 patient's probability of requiring mechanical ventilation. A challenge in the risk prediction for COVID-19 patients lies in the great variability and irregular sampling of patient's vitals and labs observed in the clinical setting. Existing methods have strong limitations in handling time-dependent features' complex dynamics, either oversimplifying temporal data with summary statistics that lose information or over-engineering features that lead to less robust outcomes. We propose a novel in-time risk trajectory predictive model to handle the irregular sampling rate in the data, which follows the dynamics of risk of performing mechanical ventilation for individual patients. The model incorporates the Multi-task Gaussian Process using observed values to learn the posterior joint multi-variant conditional probability and infer the missing values on a unified time grid. The temporal imputed data is fed into a multi-objective self-attention network for the prediction task. A novel positional encoding layer is proposed and added to the network for producing in-time predictions. The positional layer outputs a risk score at each user-defined time point during the entire hospital stay of an inpatient. We frame the prediction task into a multi-objective learning framework, and the risk scores at all time points are optimized altogether, which adds robustness and consistency to the risk score trajectory prediction. Our experimental evaluation on a large database with nationwide in-hospital patients with COVID-19 also demonstrates that it improved the state-of-the-art performance in terms of AUC (Area Under the receiver operating characteristic Curve) and AUPRC (Area Under the Precision-Recall Curve) performance metrics, especially at early times after hospital admission.
Brain-Computer-Interface controlled robot via RaspberryPi and PiEEG
Feb 04, 2022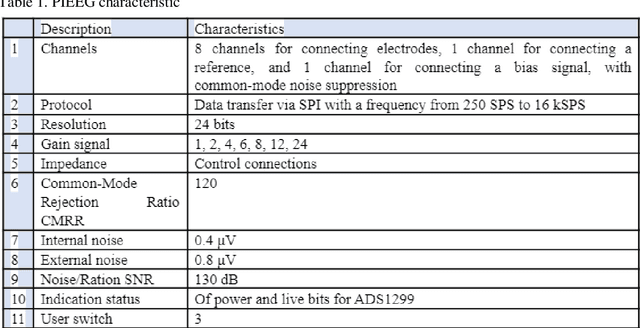
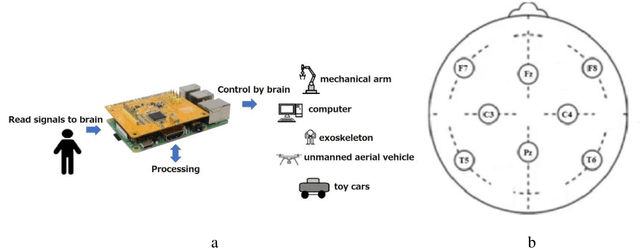
This paper presents Open-source software and a developed shield board for the Raspberry Pi family of single-board computers that can be used to read EEG signals. We have described the mechanism for reading EEG signals and decomposing them into a Fourier series and provided examples of controlling LEDs and a toy robot by blinking. Finally, we discussed the prospects of the brain-computer interface for the near future and considered various methods for controlling external mechanical objects using real-time EEG signals.
Accelerating Simulation of Stiff Nonlinear Systems using Continuous-Time Echo State Networks
Oct 07, 2020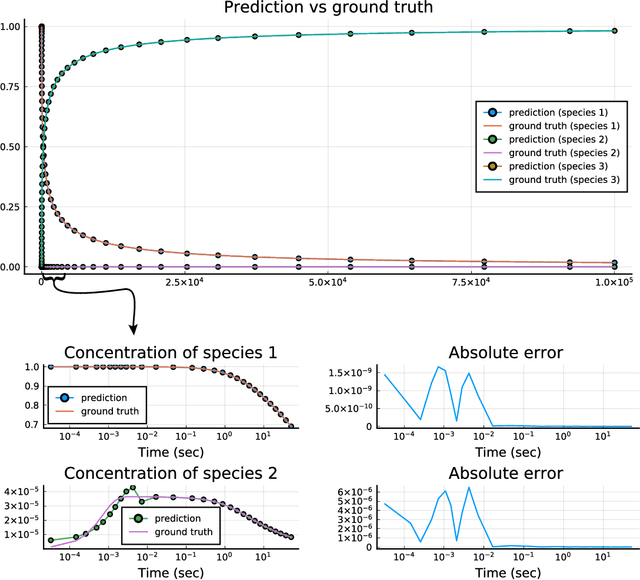
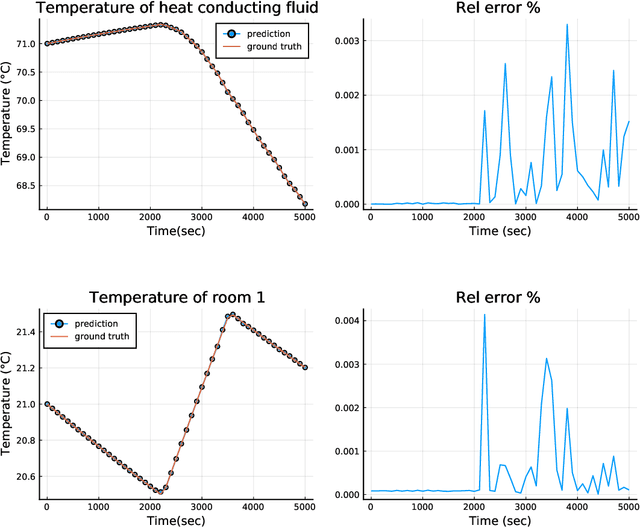
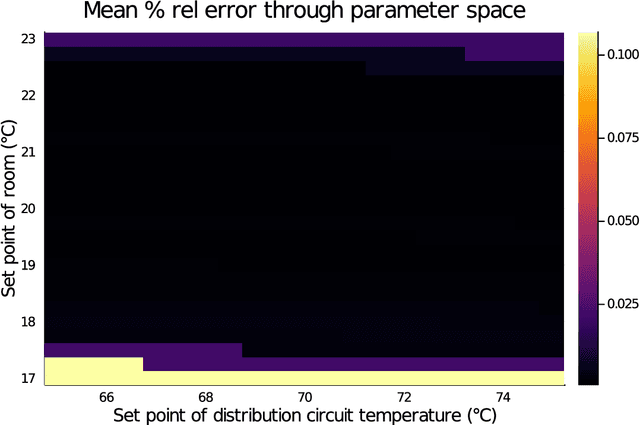
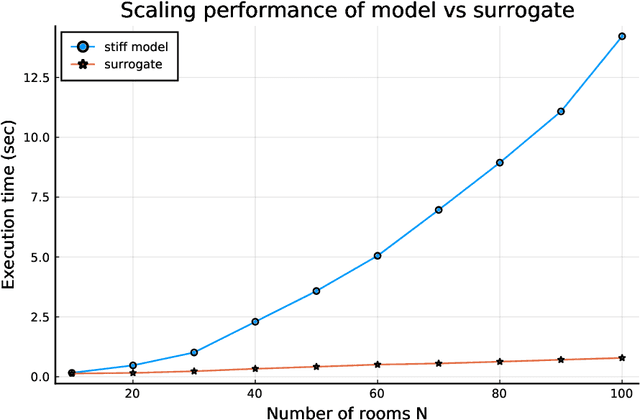
Modern design, control, and optimization often requires simulation of highly nonlinear models, leading to prohibitive computational costs. These costs can be amortized by evaluating a cheap surrogate of the full model. Here we present a general data-driven method, the continuous-time echo state network (CTESN), for generating surrogates of nonlinear ordinary differential equations with dynamics at widely separated timescales. We empirically demonstrate near-constant time performance using our CTESNs on a physically motivated scalable model of a heating system whose full execution time increases exponentially, while maintaining relative error of within 0.2 %. We also show that our model captures fast transients as well as slow dynamics effectively, while other techniques such as physics informed neural networks have difficulties trying to train and predict the highly nonlinear behavior of these models.
FVV Live: Real-Time, Low-Cost, Free Viewpoint Video
Jun 30, 2020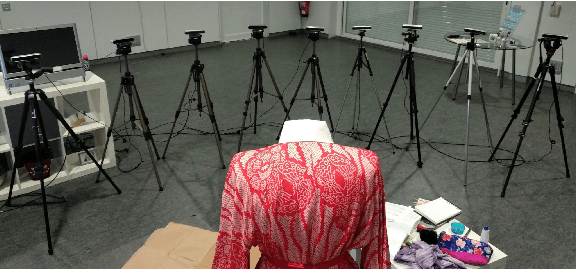
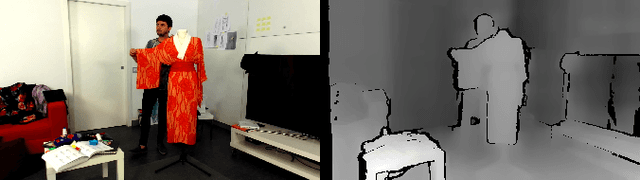
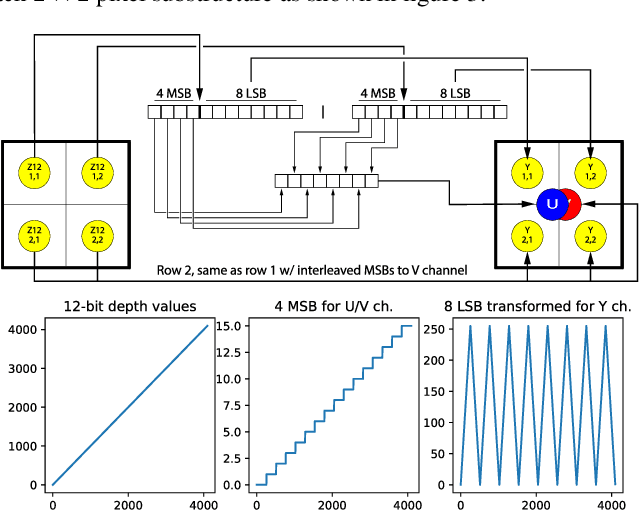
FVV Live is a novel real-time, low-latency, end-to-end free viewpoint system including capture, transmission, synthesis on an edge server and visualization and control on a mobile terminal. The system has been specially designed for low-cost and real-time operation, only using off-the-shelf components.
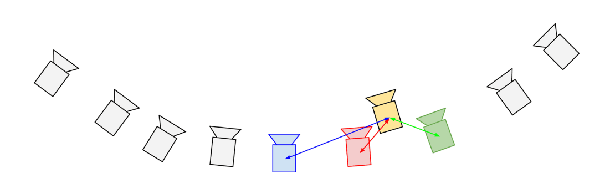
Mission planning for emergency rapid mapping with drones
Mar 02, 2022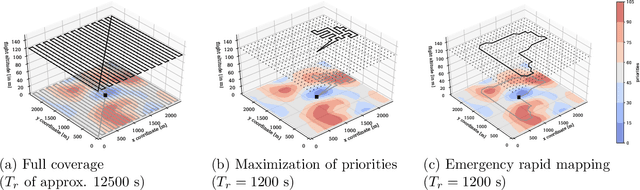
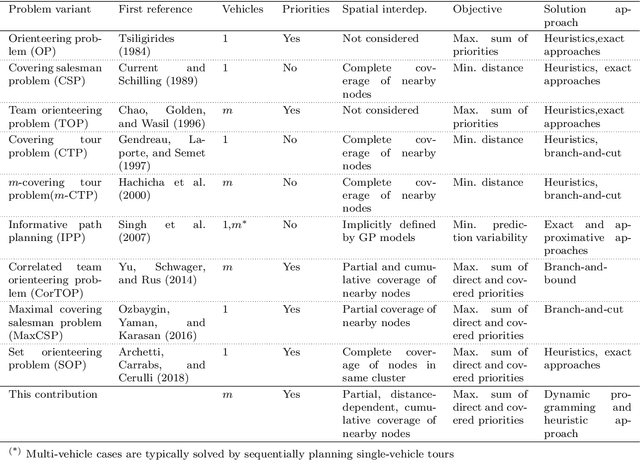
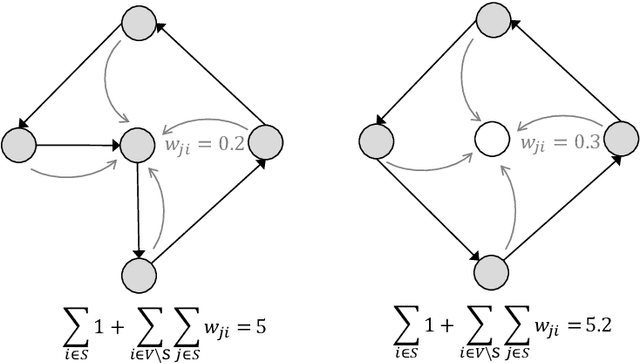
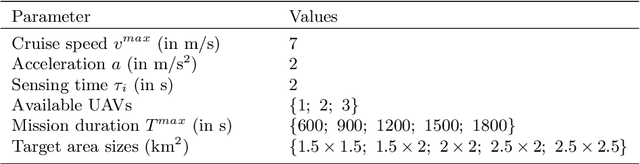
We introduce a mission planning concept for routing unmanned aerial vehicles (UAVs) through a set of sampling locations in the immediate aftermath of an incident such as a fire or chemical accident. Using interpolation methods that account for the spatial interdependencies inherent in the surveyed phenomenon, these samples allow predicting the distribution of hazardous substances across the affected area. We define the generalized correlated team orienteering problem (GCorTOP) for selecting {informative} samples considering spatial correlations between observed and unobserved locations as well as priorities in the surveyed area. To quickly provide high-quality solutions in time-sensitive situations, we propose a two-phase multi-start adaptive large neighborhood search (2MLS). We show the competitiveness of the solution approach using benchmark instances for the team orienteering problem and investigate the performance of the proposed models and solution approach in an extensive study based on newly introduced benchmark instances for the mission planning problem.