 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRangeUDF: Semantic Surface Reconstruction from 3D Point Clouds
Paper and Code
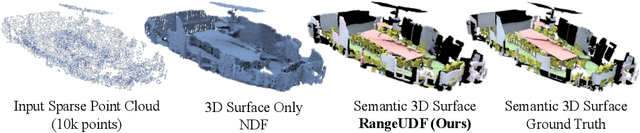

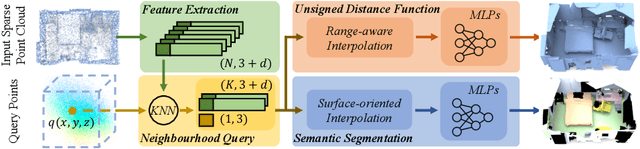
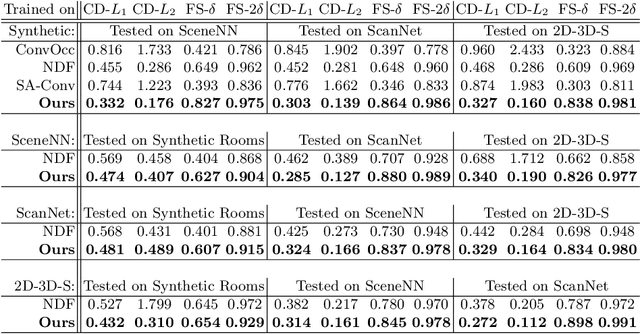
We present RangeUDF, a new implicit representation based framework to recover the geometry and semantics of continuous 3D scene surfaces from point clouds. Unlike occupancy fields or signed distance fields which can only model closed 3D surfaces, our approach is not restricted to any type of topology. Being different from the existing unsigned distance fields, our framework does not suffer from any surface ambiguity. In addition, our RangeUDF can jointly estimate precise semantics for continuous surfaces. The key to our approach is a range-aware unsigned distance function together with a surface-oriented semantic segmentation module. Extensive experiments show that RangeUDF clearly surpasses state-of-the-art approaches for surface reconstruction on four point cloud datasets. Moreover, RangeUDF demonstrates superior generalization capability across multiple unseen datasets, which is nearly impossible for all existing approaches.