 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMESA: Offline Meta-RL for Safe Adaptation and Fault Tolerance
Paper and Code
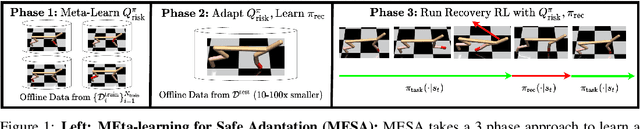

Safe exploration is critical for using reinforcement learning (RL) in risk-sensitive environments. Recent work learns risk measures which measure the probability of violating constraints, which can then be used to enable safety. However, learning such risk measures requires significant interaction with the environment, resulting in excessive constraint violations during learning. Furthermore, these measures are not easily transferable to new environments. We cast safe exploration as an offline meta-RL problem, where the objective is to leverage examples of safe and unsafe behavior across a range of environments to quickly adapt learned risk measures to a new environment with previously unseen dynamics. We then propose MEta-learning for Safe Adaptation (MESA), an approach for meta-learning a risk measure for safe RL. Simulation experiments across 5 continuous control domains suggest that MESA can leverage offline data from a range of different environments to reduce constraint violations in unseen environments by up to a factor of 2 while maintaining task performance. See https://tinyurl.com/safe-meta-rl for code and supplementary material.