 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvercoming the Force Limitations of Magnetic Robotic Surgery: Impact-based Tetherless Suturing
Paper and Code
Jul 03, 2021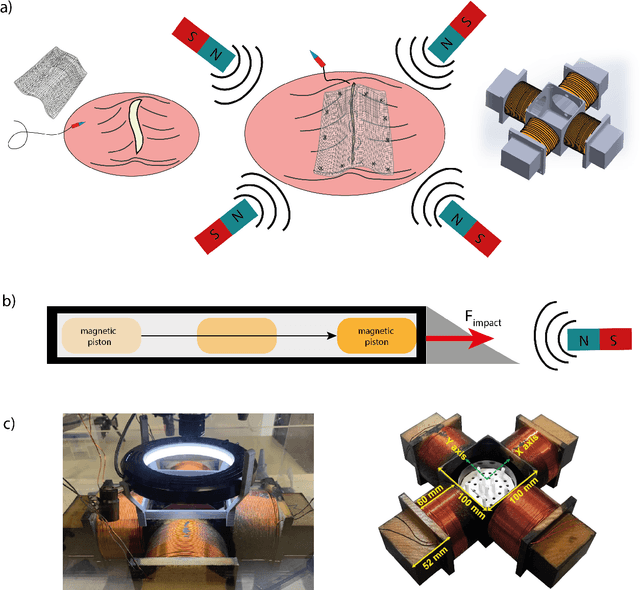
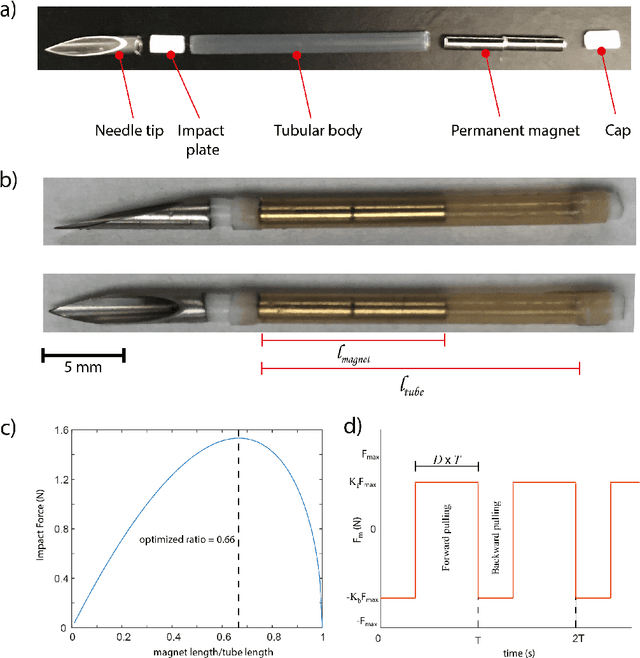
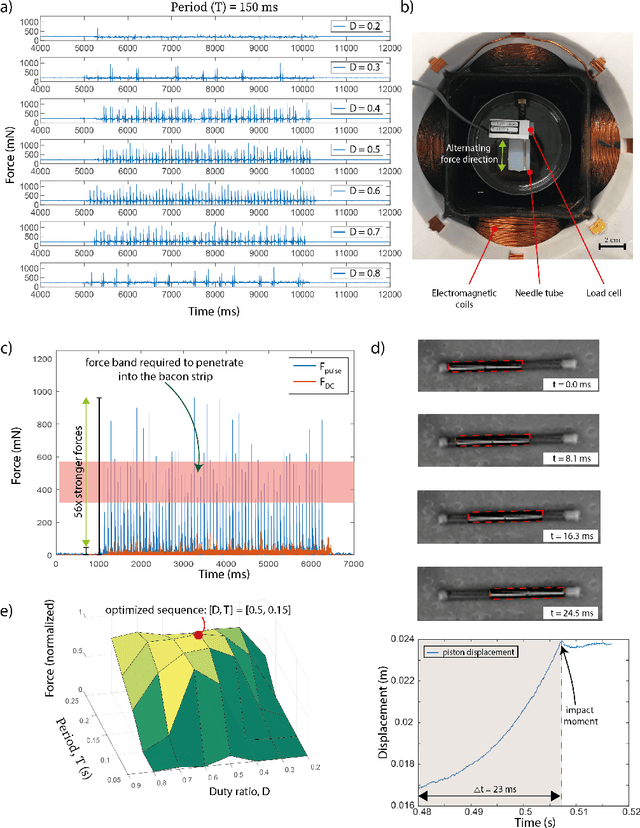
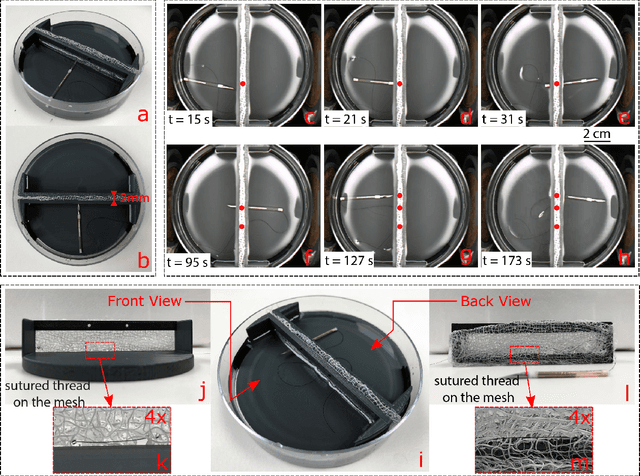
Magnetic robotics obviate the physical connections between the actuators and end effectors resulting in ultra-minimally invasive surgeries. Even though such a wireless actuation method is highly advantageous in medical applications, the trade-off between the applied force and miniature magnetic end effector dimensions has been one of the main challenges in practical applications in clinically relevant conditions. This trade-off is crucial for applications where in-tissue penetration is required (e.g., needle access, biopsy, and suturing). To increase the forces of such magnetic miniature end effectors to practically useful levels, we propose an impact-force-based suturing needle that is capable of penetrating into in-vitro and ex-vivo samples with 3-DoF planar freedom (planar positioning and in-plane orienting). The proposed optimized design is a custom-built 12 G needle that can generate 1.16 N penetration force which is 56 times stronger than its magnetic counterparts with the same size without such an impact force. By containing the fast-moving permanent magnet within the needle in a confined tubular structure, the movement of the overall needle remains slow and easily controllable. The achieved force is in the range of tissue penetration limits allowing the needle to be able to penetrate through tissues to follow a suturing method in a teleoperated fashion. We demonstrated in-vitro needle penetration into a bacon strip and successful suturing of a gauze mesh onto an agar gel mimicking a hernia repair procedure.