 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Navigation Skills for Legged Robots with Learned Robot Embeddings
Paper and Code
Nov 24, 2020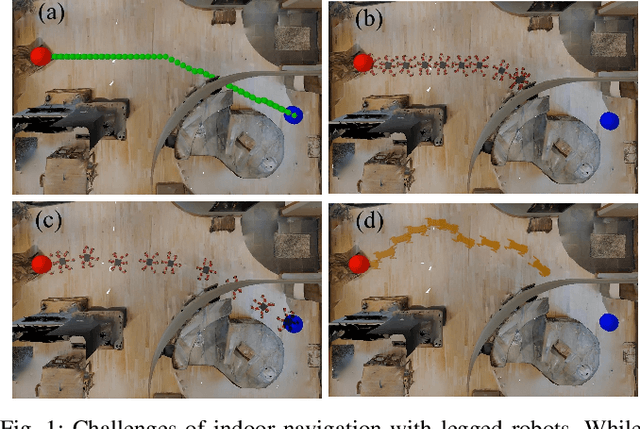
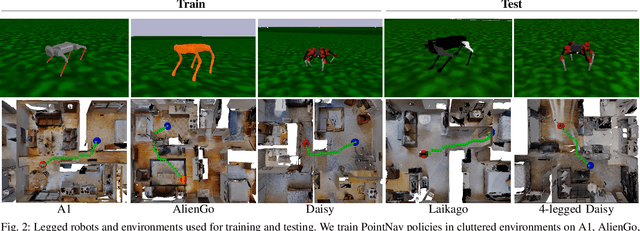
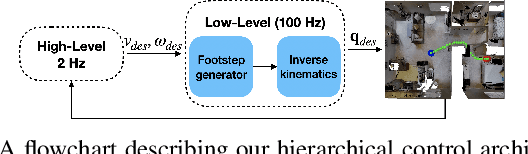
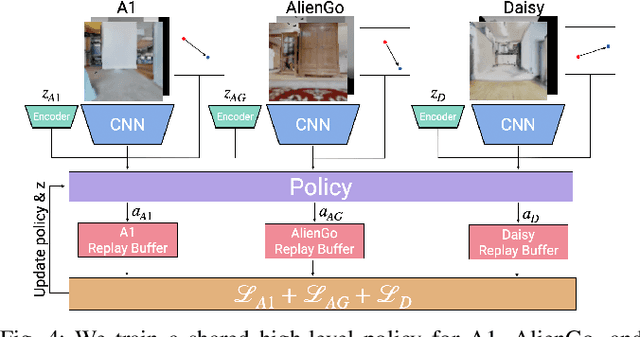
Navigation policies are commonly learned on idealized cylinder agents in simulation, without modelling complex dynamics, like contact dynamics, arising from the interaction between the robot and the environment. Such policies perform poorly when deployed on complex and dynamic robots, such as legged robots. In this work, we learn hierarchical navigation policies that account for the low-level dynamics of legged robots, such as maximum speed, slipping, and achieve good performance at navigating cluttered indoor environments. Once such a policy is learned on one legged robot, it does not directly generalize to a different robot due to dynamical differences, which increases the cost of learning such a policy on new robots. To overcome this challenge, we learn dynamics-aware navigation policies across multiple robots with robot-specific embeddings, which enable generalization to new unseen robots. We train our policies across three legged robots - 2 quadrupeds (A1, AlienGo) and a hexapod (Daisy). At test time, we study the performance of our learned policy on two new legged robots (Laikago, 4-legged Daisy) and show that our learned policy can sample-efficiently generalize to previously unseen robots.