 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile Manipulator for Autonomous Localization, Grasping and Precise Placement of Construction Material in a Semi-structured Environment
Paper and Code
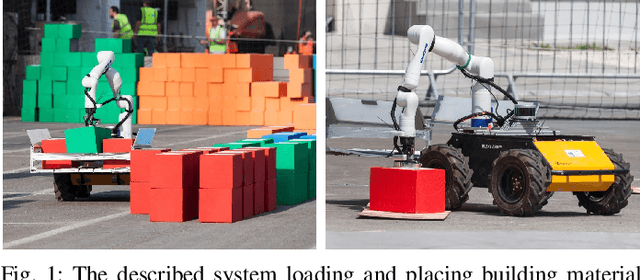
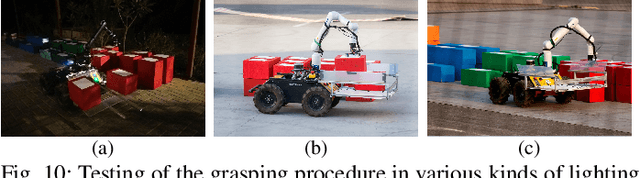
Mobile manipulators have the potential to revolutionize modern agriculture, logistics and manufacturing. In this work, we present the design of a ground-based mobile manipulator for automated structure assembly. The proposed system is capable of autonomous localization, grasping, transportation and deployment of construction material in a semi-structured environment. Special effort was put into making the system invariant to lighting changes, and not reliant on external positioning systems. Therefore, the presented system is self-contained and capable of operating in outdoor and indoor conditions alike. Finally, we present means to extend the perceptive radius of the vehicle by using it in cooperation with an autonomous drone, which provides aerial reconnaissance. Performance of the proposed system has been evaluated in a series of experiments conducted in real-world conditions.