 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Predictive Control for Multi-Agent Decision Making With Chance Constraints
Paper and Code
Nov 06, 2020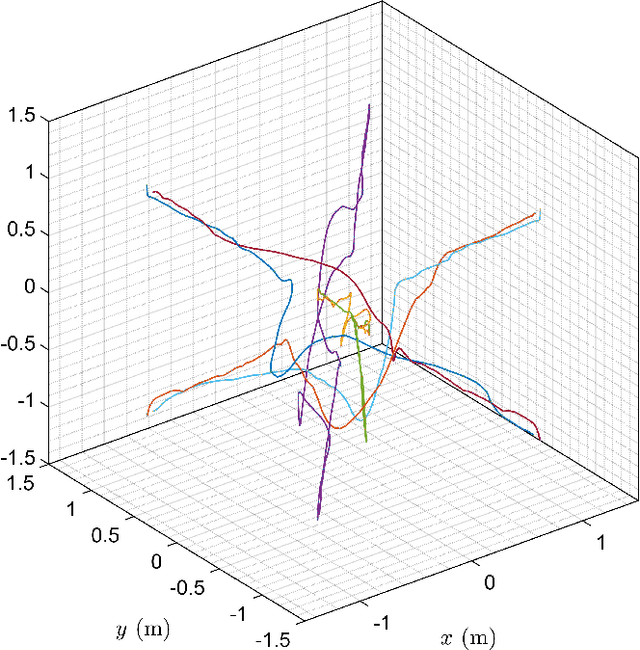
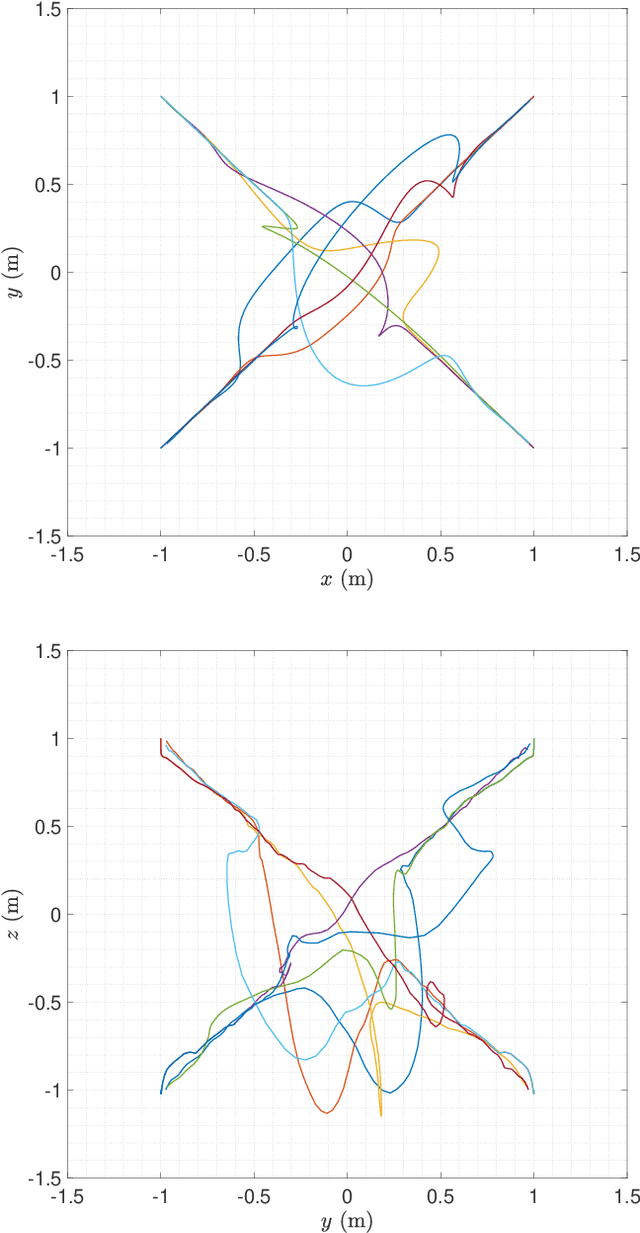
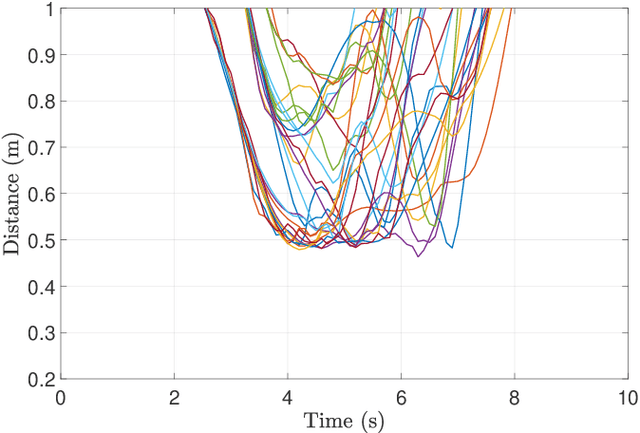
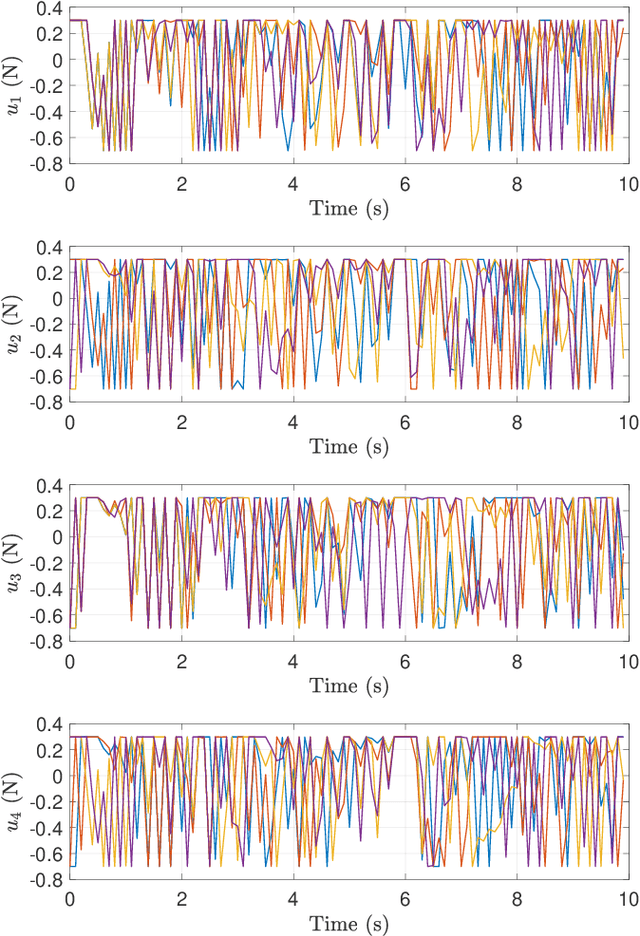
In the recent literature, significant and substantial efforts have been dedicated to the important area of multi-agent decision-making problems. Particularly here, the model predictive control (MPC) methodology has demonstrated its effectiveness in various applications, such as mobile robots, unmanned vehicles, and drones. Nevertheless, in many specific scenarios involving the MPC methodology, accurate and effective system identification is a commonly encountered challenge. As a consequence, the overall system performance could be significantly weakened in outcome when the traditional MPC algorithm is adopted under such circumstances. To cater to this rather major shortcoming, this paper investigates an alternate data-driven approach to solve the multi-agent decision-making problem. Utilizing an innovative modified methodology with suitable closed-loop input/output measurements that comply with the appropriate persistency of excitation condition, a non-parametric predictive model is suitably constructed. This non-parametric predictive model approach in the work here attains the key advantage of alleviating the rather heavy computational burden encountered in the optimization procedures typical in alternative methodologies requiring open-loop input/output measurement data collection and parametric system identification. Then with a conservative approximation of probabilistic chance constraints for the MPC problem, a resulting deterministic optimization problem is formulated and solved efficiently and effectively. In the work here, this intuitive data-driven approach is also shown to preserve good robustness properties. Finally, a multi-drone system is used to demonstrate the practical appeal and highly effective outcome of this promising development in achieving very good system performance.