 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaskNet: A Fully-Convolutional Network to Estimate Inlier Points
Paper and Code
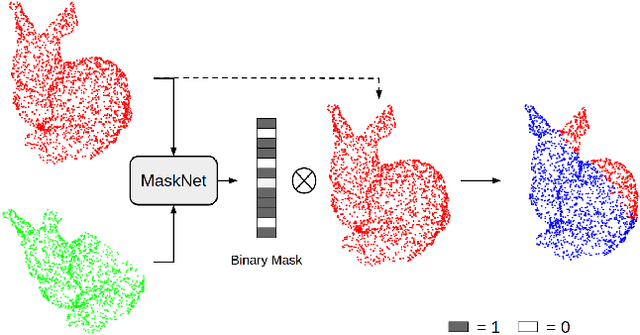
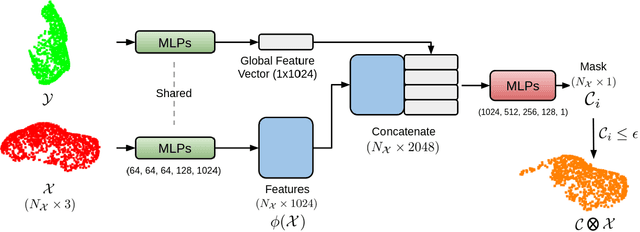
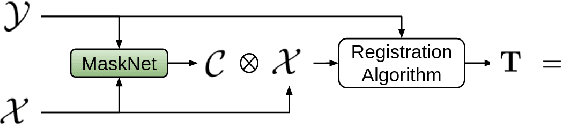
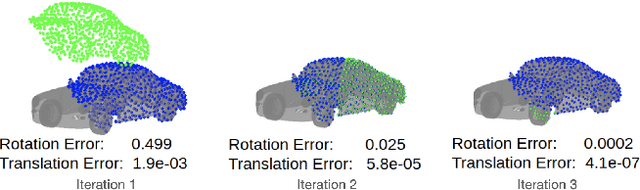
Point clouds have grown in importance in the way computers perceive the world. From LIDAR sensors in autonomous cars and drones to the time of flight and stereo vision systems in our phones, point clouds are everywhere. Despite their ubiquity, point clouds in the real world are often missing points because of sensor limitations or occlusions, or contain extraneous points from sensor noise or artifacts. These problems challenge algorithms that require computing correspondences between a pair of point clouds. Therefore, this paper presents a fully-convolutional neural network that identifies which points in one point cloud are most similar (inliers) to the points in another. We show improvements in learning-based and classical point cloud registration approaches when retrofitted with our network. We demonstrate these improvements on synthetic and real-world datasets. Finally, our network produces impressive results on test datasets that were unseen during training, thus exhibiting generalizability. Code and videos are available at https://github.com/vinits5/masknet