 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end Contextual Perception and Prediction with Interaction Transformer
Paper and Code
Aug 13, 2020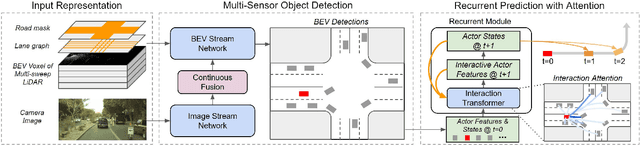

In this paper, we tackle the problem of detecting objects in 3D and forecasting their future motion in the context of self-driving. Towards this goal, we design a novel approach that explicitly takes into account the interactions between actors. To capture their spatial-temporal dependencies, we propose a recurrent neural network with a novel Transformer architecture, which we call the Interaction Transformer. Importantly, our model can be trained end-to-end, and runs in real-time. We validate our approach on two challenging real-world datasets: ATG4D and nuScenes. We show that our approach can outperform the state-of-the-art on both datasets. In particular, we significantly improve the social compliance between the estimated future trajectories, resulting in far fewer collisions between the predicted actors.