 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel Human-Object Interaction Detection via Adversarial Domain Generalization
Paper and Code
May 22, 2020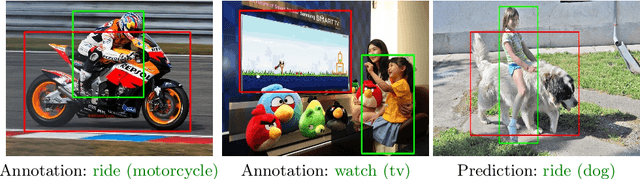
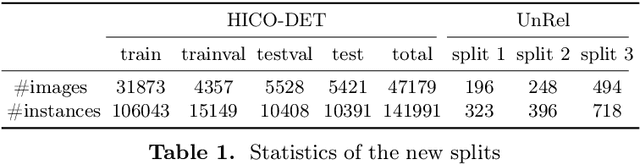
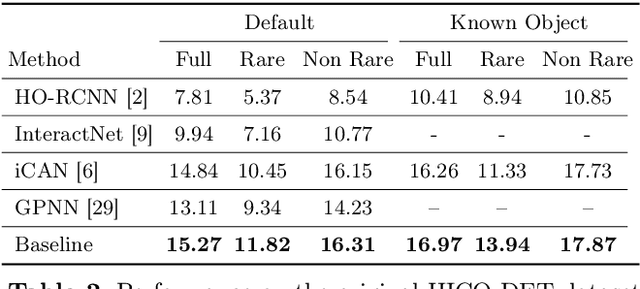
We study in this paper the problem of novel human-object interaction (HOI) detection, aiming at improving the generalization ability of the model to unseen scenarios. The challenge mainly stems from the large compositional space of objects and predicates, which leads to the lack of sufficient training data for all the object-predicate combinations. As a result, most existing HOI methods heavily rely on object priors and can hardly generalize to unseen combinations. To tackle this problem, we propose a unified framework of adversarial domain generalization to learn object-invariant features for predicate prediction. To measure the performance improvement, we create a new split of the HICO-DET dataset, where the HOIs in the test set are all unseen triplet categories in the training set. Our experiments show that the proposed framework significantly increases the performance by up to 50% on the new split of HICO-DET dataset and up to 125% on the UnRel dataset for auxiliary evaluation in detecting novel HOIs.