 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINTERACTION Dataset: An INTERnational, Adversarial and Cooperative moTION Dataset in Interactive Driving Scenarios with Semantic Maps
Paper and Code
Sep 30, 2019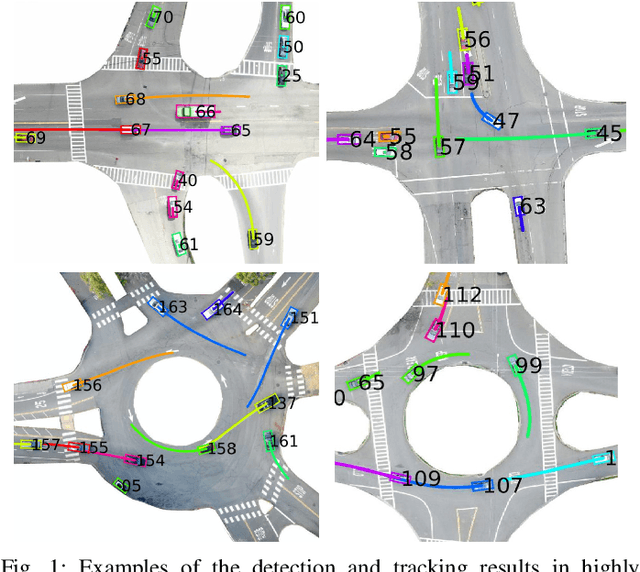
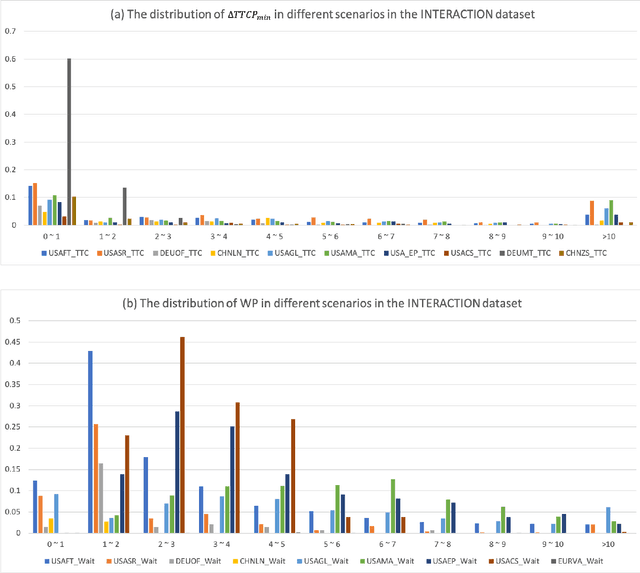
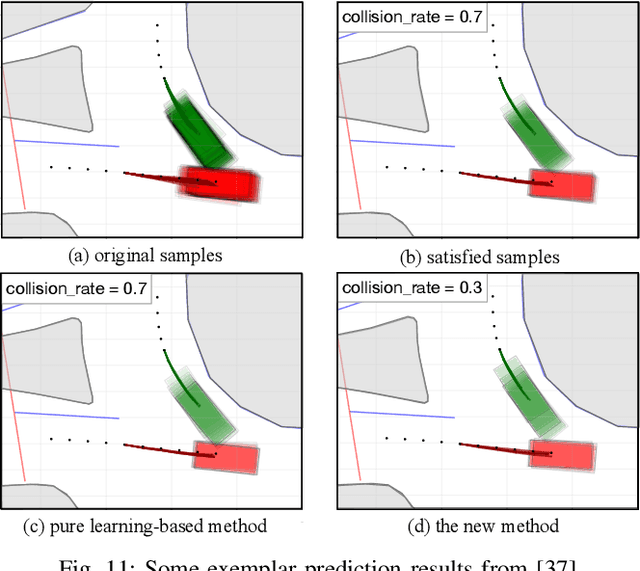
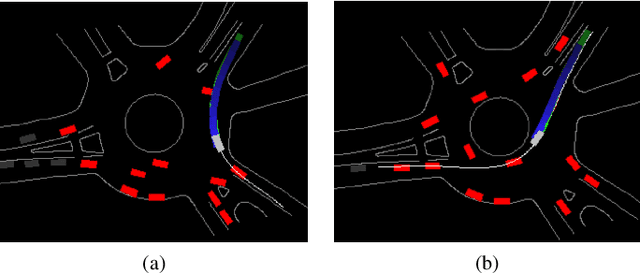
Behavior-related research areas such as motion prediction/planning, representation/imitation learning, behavior modeling/generation, and algorithm testing, require support from high-quality motion datasets containing interactive driving scenarios with different driving cultures. In this paper, we present an INTERnational, Adversarial and Cooperative moTION dataset (INTERACTION dataset) in interactive driving scenarios with semantic maps. Five features of the dataset are highlighted. 1) The interactive driving scenarios are diverse, including urban/highway/ramp merging and lane changes, roundabouts with yield/stop signs, signalized intersections, intersections with one/two/all-way stops, etc. 2) Motion data from different countries and different continents are collected so that driving preferences and styles in different cultures are naturally included. 3) The driving behavior is highly interactive and complex with adversarial and cooperative motions of various traffic participants. Highly complex behavior such as negotiations, aggressive/irrational decisions and traffic rule violations are densely contained in the dataset, while regular behavior can also be found from cautious car-following, stop, left/right/U-turn to rational lane-change and cycling and pedestrian crossing, etc. 4) The levels of criticality span wide, from regular safe operations to dangerous, near-collision maneuvers. Real collision, although relatively slight, is also included. 5) Maps with complete semantic information are provided with physical layers, reference lines, lanelet connections and traffic rules. The data is recorded from drones and traffic cameras. Statistics of the dataset in terms of number of entities and interaction density are also provided, along with some utilization examples in a variety of behavior-related research areas. The dataset can be downloaded via https://interaction-dataset.com.