 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePyRobot: An Open-source Robotics Framework for Research and Benchmarking
Paper and Code
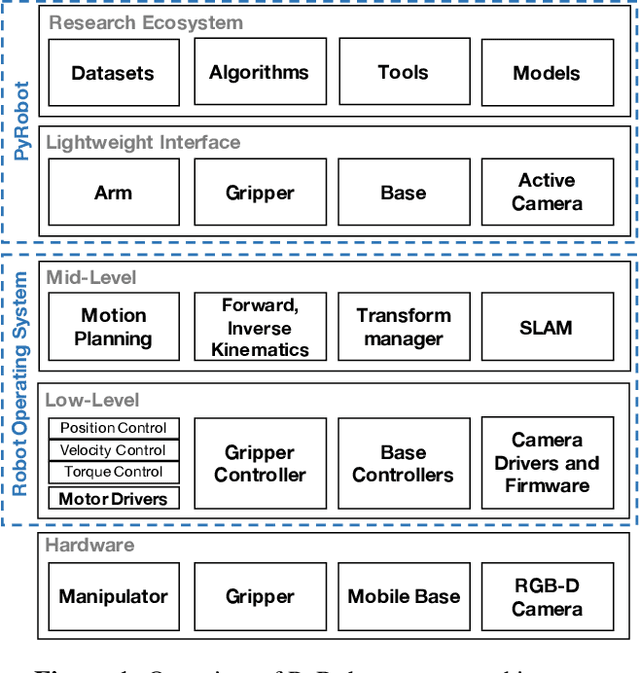
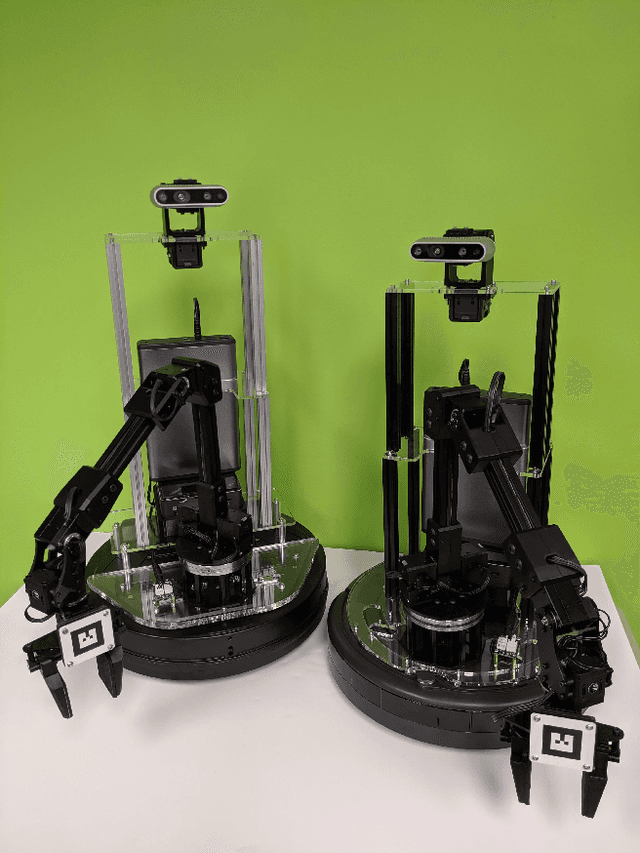
This paper introduces PyRobot, an open-source robotics framework for research and benchmarking. PyRobot is a light-weight, high-level interface on top of ROS that provides a consistent set of hardware independent mid-level APIs to control different robots. PyRobot abstracts away details about low-level controllers and inter-process communication, and allows non-robotics researchers (ML, CV researchers) to focus on building high-level AI applications. PyRobot aims to provide a research ecosystem with convenient access to robotics datasets, algorithm implementations and models that can be used to quickly create a state-of-the-art baseline. We believe PyRobot, when paired up with low-cost robot platforms such as LoCoBot, will reduce the entry barrier into robotics, and democratize robotics. PyRobot is open-source, and can be accessed via https://pyrobot.org.