 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultidimensional Capacitive Sensing for Robot-Assisted Dressing and Bathing
Paper and Code
Apr 03, 2019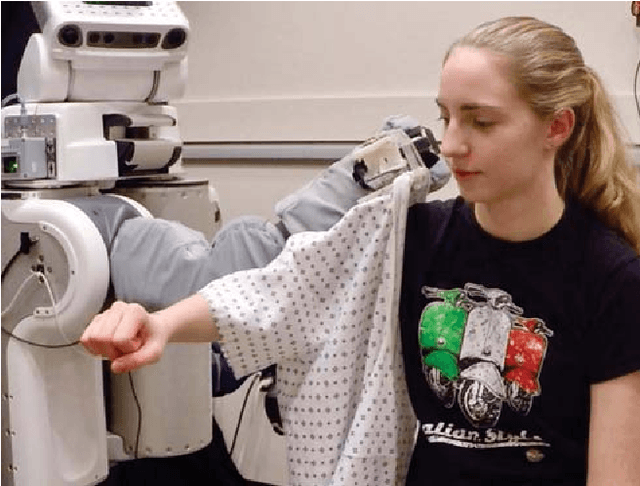

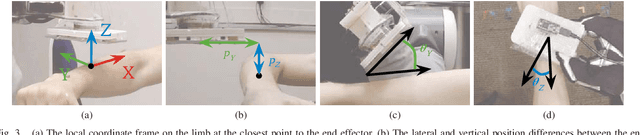
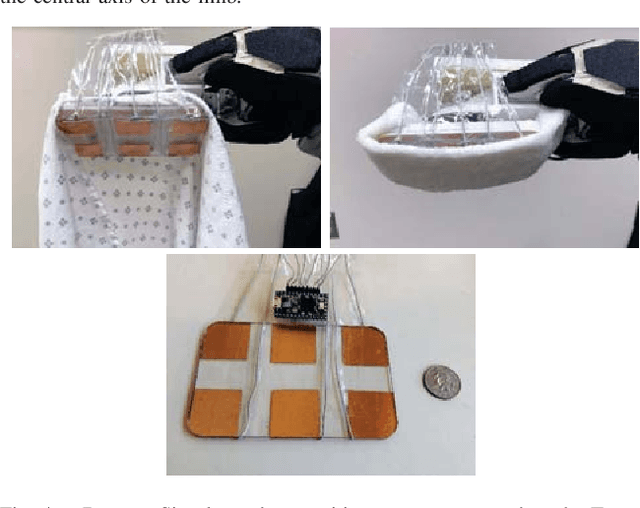
Robotic assistance presents an opportunity to benefit the lives of many adults with physical disabilities, yet accurately sensing the human body and tracking human motion remain difficult for robots. We present a multidimensional capacitive sensing technique capable of sensing the local pose of a human limb in real time. This sensing approach is unaffected by many visual occlusions that obscure sight of a person's body during robotic assistance, while also allowing a robot to sense the human body through some conductive materials, such as wet cloth. Given measurements from this capacitive sensor, we train a neural network model to estimate the relative vertical and lateral position to the closest point on a person's limb, as well as the pitch and yaw orientation between a robot's end effector and the central axis of the limb. We demonstrate that a PR2 robot can use this sensing approach to assist with two activities of daily living-dressing and bathing. Our robot pulled the sleeve of a hospital gown onto participants' right arms, while using capacitive sensing with feedback control to track human motion. When assisting with bathing, the robot used capacitive sensing with a soft wet washcloth to follow the contours of a participant's limbs and clean the surface of the body. Overall, we find that multidimensional capacitive sensing presents a promising approach for robots to sense and track the human body during assistive tasks that require physical human-robot interaction.