 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural probabilistic motor primitives for humanoid control
Paper and Code
Jan 15, 2019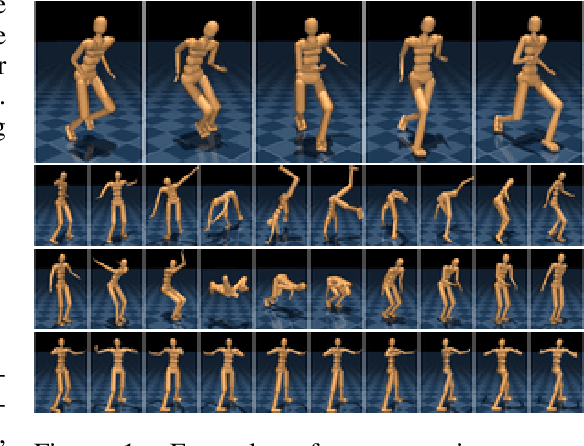
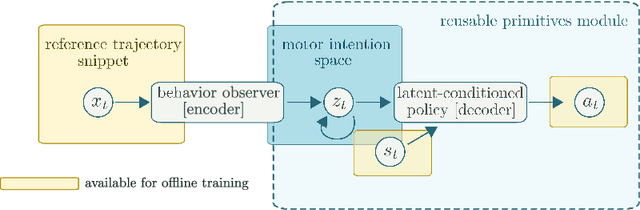
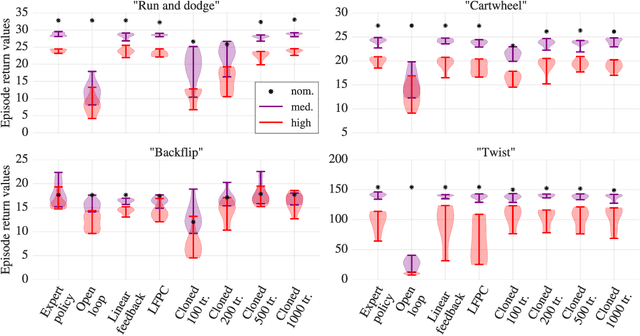
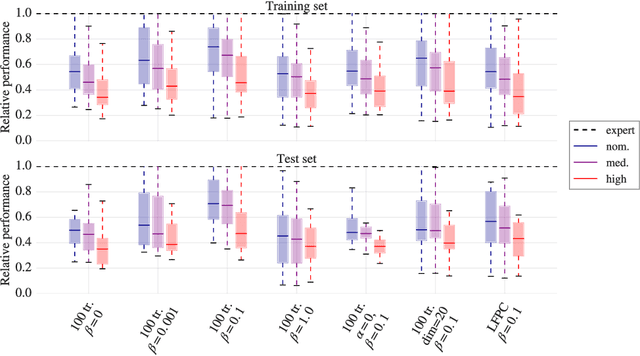
We focus on the problem of learning a single motor module that can flexibly express a range of behaviors for the control of high-dimensional physically simulated humanoids. To do this, we propose a motor architecture that has the general structure of an inverse model with a latent-variable bottleneck. We show that it is possible to train this model entirely offline to compress thousands of expert policies and learn a motor primitive embedding space. The trained neural probabilistic motor primitive system can perform one-shot imitation of whole-body humanoid behaviors, robustly mimicking unseen trajectories. Additionally, we demonstrate that it is also straightforward to train controllers to reuse the learned motor primitive space to solve tasks, and the resulting movements are relatively naturalistic. To support the training of our model, we compare two approaches for offline policy cloning, including an experience efficient method which we call linear feedback policy cloning. We encourage readers to view a supplementary video ( https://youtu.be/CaDEf-QcKwA ) summarizing our results.