 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Task-Oriented Grasping for Tool Manipulation from Simulated Self-Supervision
Paper and Code
Jun 25, 2018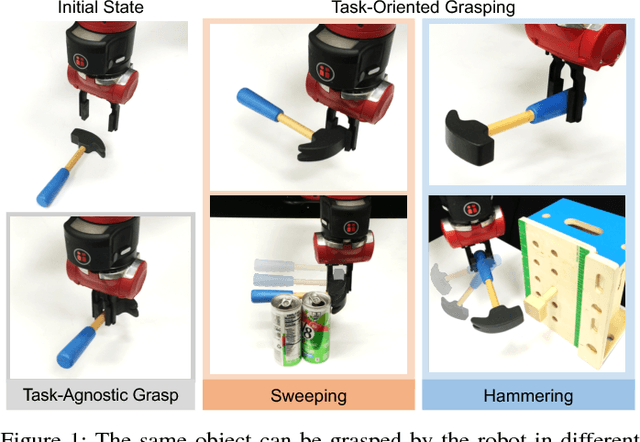
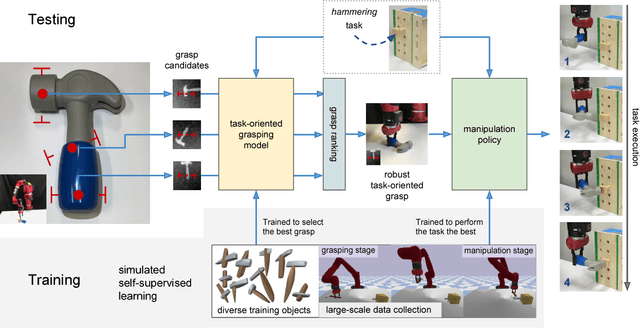
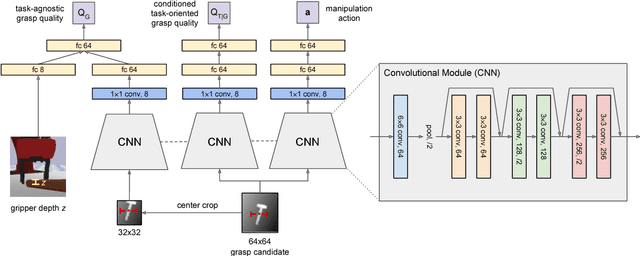
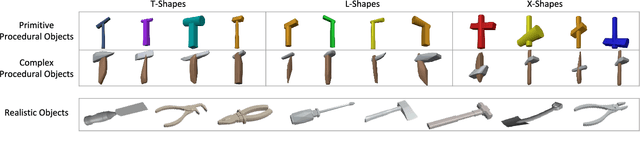
Tool manipulation is vital for facilitating robots to complete challenging task goals. It requires reasoning about the desired effect of the task and thus properly grasping and manipulating the tool to achieve the task. Task-agnostic grasping optimizes for grasp robustness while ignoring crucial task-specific constraints. In this paper, we propose the Task-Oriented Grasping Network (TOG-Net) to jointly optimize both task-oriented grasping of a tool and the manipulation policy for that tool. The training process of the model is based on large-scale simulated self-supervision with procedurally generated tool objects. We perform both simulated and real-world experiments on two tool-based manipulation tasks: sweeping and hammering. Our model achieves overall 71.1% task success rate for sweeping and 80.0% task success rate for hammering. Supplementary material is available at: bit.ly/task-oriented-grasp