Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Goal Reinforcement Learning: Challenging Robotics Environments and Request for Research
Paper and Code

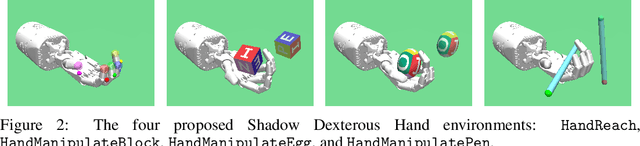
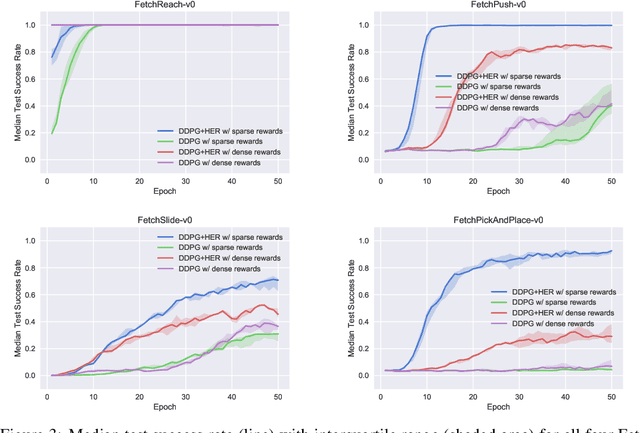
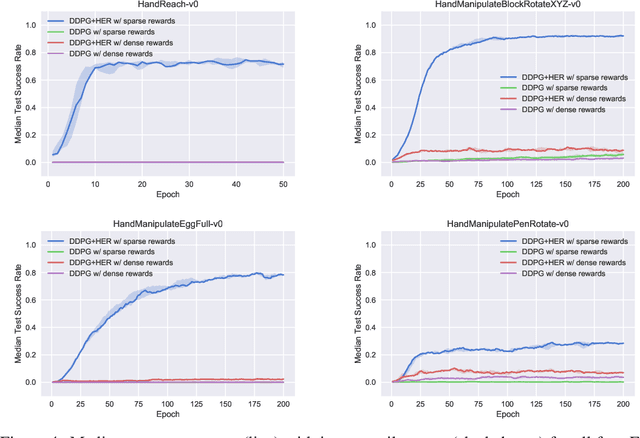
The purpose of this technical report is two-fold. First of all, it introduces a suite of challenging continuous control tasks (integrated with OpenAI Gym) based on currently existing robotics hardware. The tasks include pushing, sliding and pick & place with a Fetch robotic arm as well as in-hand object manipulation with a Shadow Dexterous Hand. All tasks have sparse binary rewards and follow a Multi-Goal Reinforcement Learning (RL) framework in which an agent is told what to do using an additional input. The second part of the paper presents a set of concrete research ideas for improving RL algorithms, most of which are related to Multi-Goal RL and Hindsight Experience Replay.
View paper on