 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniBYD: A Unified Framework for Learning Robotic Manipulation Across Embodiments Beyond Imitation of Human Demonstrations
Dec 12, 2025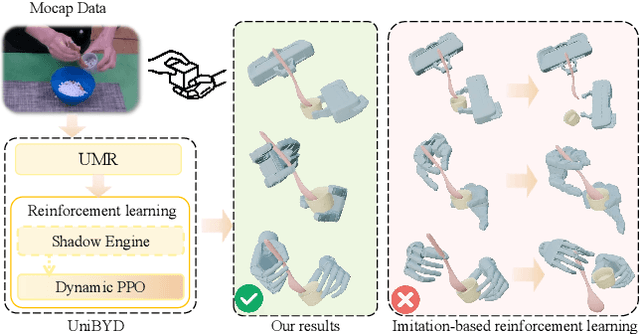
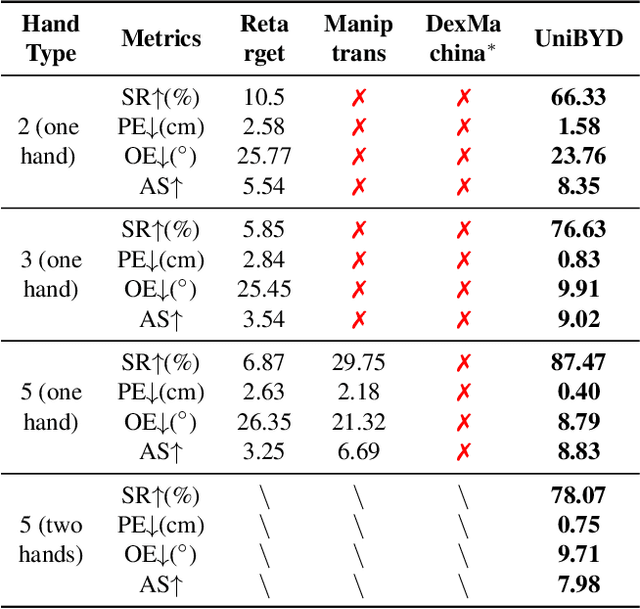
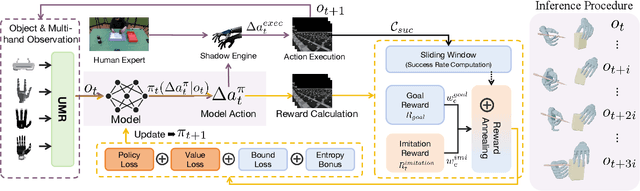
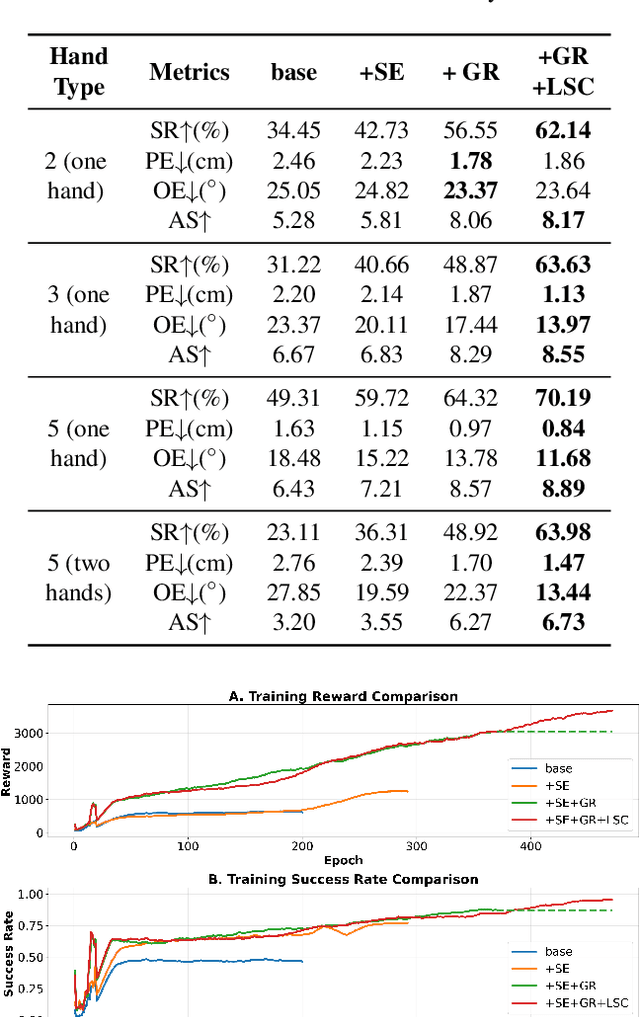
In embodied intelligence, the embodiment gap between robotic and human hands brings significant challenges for learning from human demonstrations. Although some studies have attempted to bridge this gap using reinforcement learning, they remain confined to merely reproducing human manipulation, resulting in limited task performance. In this paper, we propose UniBYD, a unified framework that uses a dynamic reinforcement learning algorithm to discover manipulation policies aligned with the robot's physical characteristics. To enable consistent modeling across diverse robotic hand morphologies, UniBYD incorporates a unified morphological representation (UMR). Building on UMR, we design a dynamic PPO with an annealed reward schedule, enabling reinforcement learning to transition from imitation of human demonstrations to explore policies adapted to diverse robotic morphologies better, thereby going beyond mere imitation of human hands. To address the frequent failures of learning human priors in the early training stage, we design a hybrid Markov-based shadow engine that enables reinforcement learning to imitate human manipulations in a fine-grained manner. To evaluate UniBYD comprehensively, we propose UniManip, the first benchmark encompassing robotic manipulation tasks spanning multiple hand morphologies. Experiments demonstrate a 67.90% improvement in success rate over the current state-of-the-art. Upon acceptance of the paper, we will release our code and benchmark at https://github.com/zhanheng-creator/UniBYD.