 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUME: A Unified Meta-Generalization Framework for Cross-Domain ETA
May 31, 2026Accurate Estimated Time of Arrival (ETA) prediction on checkout page is crucial in instant logistics for enhancing user satisfaction, optimizing dispatching, and controlling operational costs. In international on-demand delivery platforms, where ETA data originates from diverse countries or regions with different patterns, multi-domain modeling is of great importance and has been widely adopted. However, existing methods still face three critical challenges in real-world deployment. First, current multi-domain models struggle to generalize to completely unseen domains, failing to achieve zero-shot prediction during the initial cold-start phase. Second, cross-domain feature spaces are often assumed to be consistent, whereas new domains commonly suffer from structural missingness of offline (statistical) features due to the lack of historical data. Third, such feature missingness often compels industrial systems to model mature and cold-start domains separately, hindering knowledge transfer and increasing maintenance overhead. To address these challenges, we propose \textbf{UME}, a \textbf{U}nified \textbf{M}eta-generalization framework for \textbf{E}TA. Specifically, UME integrates a unified dual-branch architecture with a novel meta-learning mechanism that employs a hypernetwork-based meta learner. By leveraging domain-level knowledge and instance-level context, the meta learner empowers three meta modules to dynamically modulate feature gating, expert attention, and final prediction, capturing cross-domain correlations and facilitating intra-domain adaptation. A knowledge distillation strategy is further introduce to enhance performance. UME has now been deployed in Meituan-keeta delivery platform (the largest international food delivery platform in China). Extensive offline experiments and online A/B tests demonstrate that UME significantly outperforms existing baselines.
AoE: Always-on Egocentric Human Video Collection for Embodied AI
Mar 02, 2026Embodied foundation models require large-scale, high-quality real-world interaction data for pre-training and scaling. However, existing data collection methods suffer from high infrastructure costs, complex hardware dependencies, and limited interaction scope, making scalable expansion challenging. In fact, humans themselves are ideal physically embodied agents. Therefore, obtaining egocentric real-world interaction data from globally distributed "human agents" offers advantages of low cost and sustainability. To this end, we propose the Always-on Egocentric (AoE) data collection system, which aims to simplify hardware dependencies by leveraging humans themselves and their smartphones, enabling low-cost, highly efficient, and scene-agnostic real-world interaction data collection to address the challenge of data scarcity. Specifically, we first employ an ergonomic neck-mounted smartphone holder to enable low-barrier, large-scale egocentric data collection through a cloud-edge collaborative architecture. Second, we develop a cross-platform mobile APP that leverages on-device compute for real-time processing, while the cloud hosts automated labeling and filtering pipelines that transform raw videos into high-quality training data. Finally, the AoE system supports distributed Ego video data collection by anyone, anytime, and anywhere. We evaluate AoE on data preprocessing quality and downstream tasks, demonstrating that high-quality egocentric data significantly boosts real-world generalization.
Residual Dense Swin Transformer for Continuous Depth-Independent Ultrasound Imaging
Mar 25, 2024Ultrasound imaging is crucial for evaluating organ morphology and function, yet depth adjustment can degrade image quality and field-of-view, presenting a depth-dependent dilemma. Traditional interpolation-based zoom-in techniques often sacrifice detail and introduce artifacts. Motivated by the potential of arbitrary-scale super-resolution to naturally address these inherent challenges, we present the Residual Dense Swin Transformer Network (RDSTN), designed to capture the non-local characteristics and long-range dependencies intrinsic to ultrasound images. It comprises a linear embedding module for feature enhancement, an encoder with shifted-window attention for modeling non-locality, and an MLP decoder for continuous detail reconstruction. This strategy streamlines balancing image quality and field-of-view, which offers superior textures over traditional methods. Experimentally, RDSTN outperforms existing approaches while requiring fewer parameters. In conclusion, RDSTN shows promising potential for ultrasound image enhancement by overcoming the limitations of conventional interpolation-based methods and achieving depth-independent imaging.
* Accepted by ICASSP2024, https://ieeexplore.ieee.org/document/10447712
Bridging the Gaps: Learning Verifiable Model-Free Quadratic Programming Controllers Inspired by Model Predictive Control
Dec 26, 2023



In this paper, we introduce a new class of parameterized controllers, drawing inspiration from Model Predictive Control (MPC). The controller resembles a Quadratic Programming (QP) solver of a linear MPC problem, with the parameters of the controller being trained via Deep Reinforcement Learning (DRL) rather than derived from system models. This approach addresses the limitations of common controllers with Multi-Layer Perceptron (MLP) or other general neural network architecture used in DRL, in terms of verifiability and performance guarantees, and the learned controllers possess verifiable properties like persistent feasibility and asymptotic stability akin to MPC. On the other hand, numerical examples illustrate that the proposed controller empirically matches MPC and MLP controllers in terms of control performance and has superior robustness against modeling uncertainty and noises. Furthermore, the proposed controller is significantly more computationally efficient compared to MPC and requires fewer parameters to learn than MLP controllers. Real-world experiments on vehicle drift maneuvering task demonstrate the potential of these controllers for robotics and other demanding control tasks.
Aggressive Racecar Drifting Control Using Onboard Cameras and Inertial Measurement Unit
Feb 28, 2022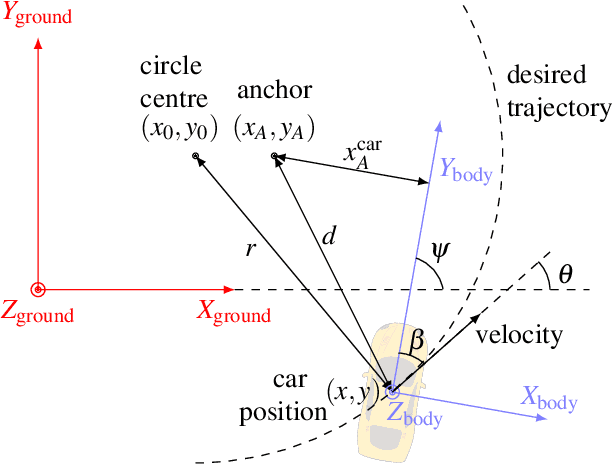
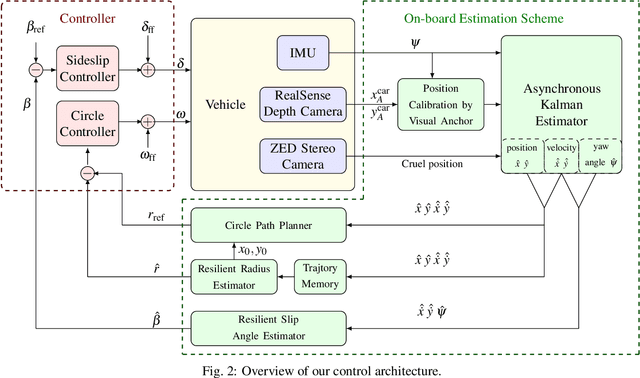
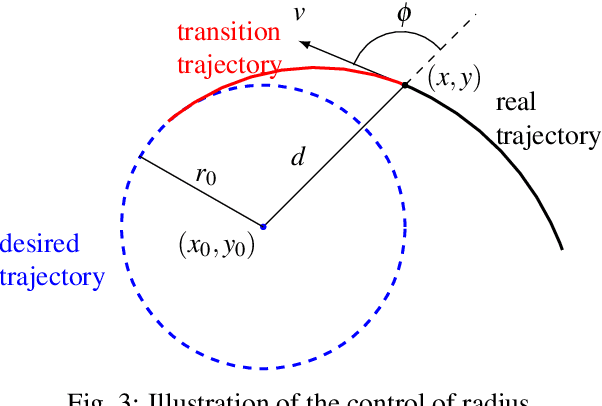
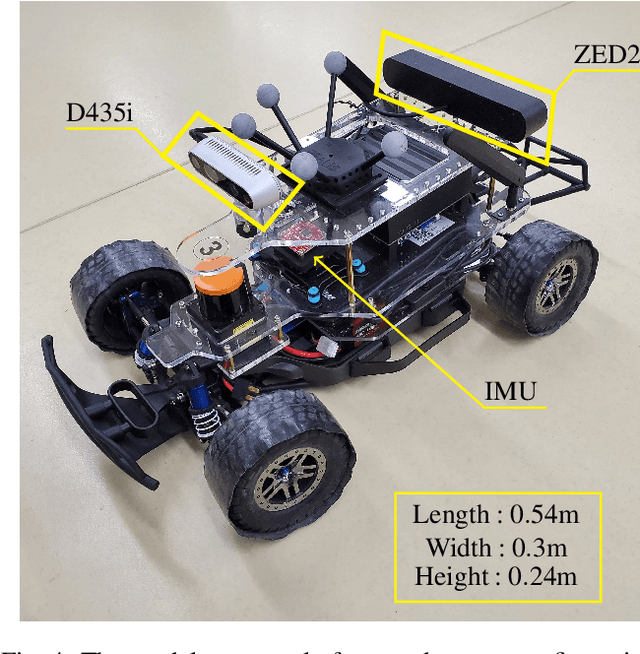
Complex autonomous driving, such as drifting, requires high-precision and high-frequency pose information to ensure accuracy and safety, which is notably difficult when using only onboard sensors. In this paper, we propose a drift controller with two feedback control loops: sideslip controller that stabilizes the sideslip angle by tuning the front wheel steering angle, and circle controller that maintains a stable trajectory radius and circle center by controlling the wheel rotational speed. We use an extended Kalman filter to estimate the state. A robustified KASA algorithm is further proposed to accurately estimate the parameters of the circle (i.e., the center and radius) that best fits into the current trajectory. On the premise of the uniform circular motion of the vehicle in the process of stable drift, we use angle information instead of acceleration to describe the dynamic of the vehicle. We implement our method on a 1/10 scale race car. The car drifts stably with a given center and radius, which illustrates the effectiveness of our method.