 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based and Data-Driven Hierarchical Control and Topology Co-Design for Robust Networked Systems
Jun 10, 2026In this paper, we consider a class of networked systems comprising an interconnected set of linear subsystems, disturbance inputs, and performance outputs. Using dissipativity theory, we first propose a model-based hierarchical control design strategy to ensure the closed-loop networked system is dissipative from its disturbance inputs to performance outputs. This involves designing local controllers for each subsystem to enforce local dissipativity guarantees, which are then exploited to co-design distributed global controllers and the interconnection topology to enforce global dissipativity guarantees while optimizing interconnection topology costs. The overall design process requires only solving a sequence of linear matrix inequality (LMI) problems, thereby retaining compositionality and decentralizability while avoiding non-convex, iterative design processes that are inefficient and centralized. This model-based hierarchical control design strategy assumes the knowledge of the subsystem dynamics, which may not hold in many real-world networked systems. Motivated by this, we also propose a data-driven hierarchical control design strategy that assumes only the availability of rich input-state-output trajectory data from the subsystems. The proposed data-driven design process assumes that the unknown disturbances affecting the subsystem dynamics are bounded by a quadratic matrix inequality (relaxing conventional bounds) and accounts for this by using the matrix S-lemma. Finally, the effectiveness of the proposed model-based and data-driven hierarchical control designs is illustrated for a networked system representing a DC microgrid, with the aim of enforcing robust (dissipative) voltage regulation and current sharing.
Dreaming when Necessary: Advancing World Action Models with Adaptive Multi-Modal Reasoning
Jun 05, 2026World Action Models (WAMs) offer a promising approach to embodied intelligence, yet existing methods rely heavily on video prediction as action priors and lack adaptive multimodal reasoning, limiting their effectiveness on long-horizon, complex tasks. We observe that WAMs require different multimodal reasoning modes under different execution contexts: textual reasoning is essential during task transitions to guide high-level action prediction, while visual reasoning is critical during fine-grained manipulation for precise control. Motivated by this observation, we propose \textbf{AdaWAM}, a world action model with adaptive multimodal reasoning abilities. AdaWAM integrates a lightweight dynamic router that autonomously triggers textual or visual reasoning as needed during task execution. Experiments on both simulated and real-world embodied tasks show that AdaWAM substantially improves inference efficiency while outperforming state-of-the-art embodied policies. Codes and demos are available at: https://adawam.github.io/.
Graph Neural Network-Based Distributed Optimal Control for Linear Networked Systems: An Online Distributed Training Approach
Apr 08, 2025In this paper, we consider the distributed optimal control problem for linear networked systems. In particular, we are interested in learning distributed optimal controllers using graph recurrent neural networks (GRNNs). Most of the existing approaches result in centralized optimal controllers with offline training processes. However, as the increasing demand of network resilience, the optimal controllers are further expected to be distributed, and are desirable to be trained in an online distributed fashion, which are also the main contributions of our work. To solve this problem, we first propose a GRNN-based distributed optimal control method, and we cast the problem as a self-supervised learning problem. Then, the distributed online training is achieved via distributed gradient computation, and inspired by the (consensus-based) distributed optimization idea, a distributed online training optimizer is designed. Furthermore, the local closed-loop stability of the linear networked system under our proposed GRNN-based controller is provided by assuming that the nonlinear activation function of the GRNN-based controller is both local sector-bounded and slope-restricted. The effectiveness of our proposed method is illustrated by numerical simulations using a specifically developed simulator.
Automated Identification and Segmentation of Hi Sources in CRAFTS Using Deep Learning Method
Mar 29, 2024



We introduce a machine learning-based method for extracting HI sources from 3D spectral data, and construct a dedicated dataset of HI sources from CRAFTS. Our custom dataset provides comprehensive resources for HI source detection. Utilizing the 3D-Unet segmentation architecture, our method reliably identifies and segments HI sources, achieving notable performance metrics with recall rates reaching 91.6% and accuracy levels at 95.7%. These outcomes substantiate the value of our custom dataset and the efficacy of our proposed network in identifying HI source. Our code is publicly available at https://github.com/fishszh/HISF.
PI-AstroDeconv: A Physics-Informed Unsupervised Learning Method for Astronomical Image Deconvolution
Mar 04, 2024In the imaging process of an astronomical telescope, the deconvolution of its beam or Point Spread Function (PSF) is a crucial task. However, deconvolution presents a classical and challenging inverse computation problem. In scenarios where the beam or PSF is complex or inaccurately measured, such as in interferometric arrays and certain radio telescopes, the resultant blurry images are often challenging to interpret visually or analyze using traditional physical detection methods. We argue that traditional methods frequently lack specific prior knowledge, thereby leading to suboptimal performance. To address this issue and achieve image deconvolution and reconstruction, we propose an unsupervised network architecture that incorporates prior physical information. The network adopts an encoder-decoder structure while leveraging the telescope's PSF as prior knowledge. During network training, we introduced accelerated Fast Fourier Transform (FFT) convolution to enable efficient processing of high-resolution input images and PSFs. We explored various classic regression networks, including autoencoder (AE) and U-Net, and conducted a comprehensive performance evaluation through comparative analysis.
Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded Disturbances
Mar 04, 2022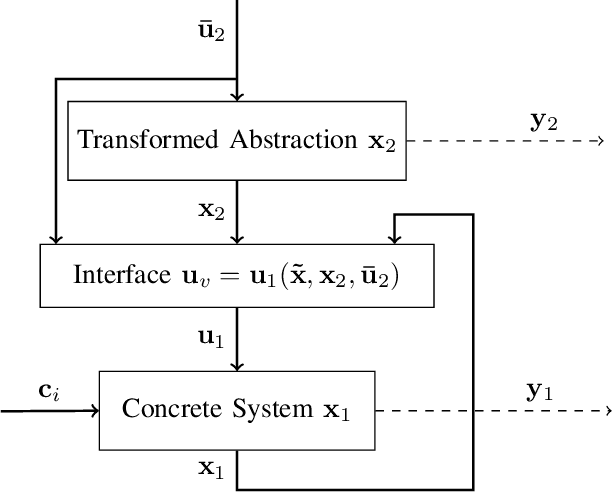
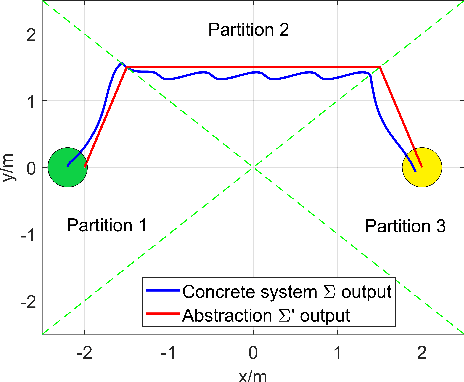
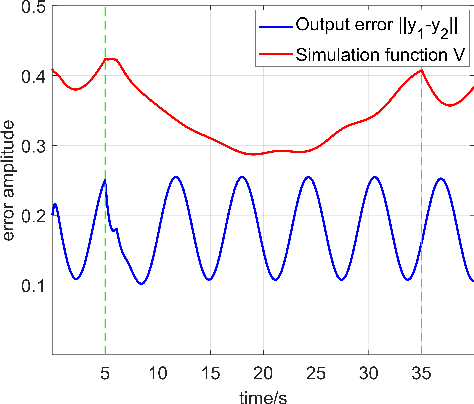
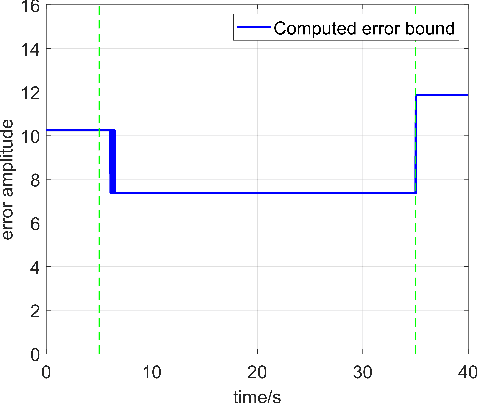
Piecewise affine (PWA) systems are widely applied in many practical cases such as the control of nonlinear systems and hybrid dynamics. However, most of the existing PWA control methods have poor scalability with respect to the number of modes and system dimensions and may not be robust to the disturbances in performance. In this paper, we present a robust approximate simulation based control method for PWA systems under bounded external disturbances. First, a lower-dimensional linear system (abstraction) and an associated interface are designed to enable the output of the PWA system (concrete system) to track the output of the abstraction. Then, a Lyapunov-like simulation function is designed to show the boundedness of the output errors between the two systems. Furthermore, the results obtained for linear abstraction are extended to the case that a simpler PWA system is the abstraction. To illustrate the effectiveness of the proposed approach, simulation results are provided for two design examples.