 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based and Data-Driven Hierarchical Control and Topology Co-Design for Robust Networked Systems
Jun 10, 2026In this paper, we consider a class of networked systems comprising an interconnected set of linear subsystems, disturbance inputs, and performance outputs. Using dissipativity theory, we first propose a model-based hierarchical control design strategy to ensure the closed-loop networked system is dissipative from its disturbance inputs to performance outputs. This involves designing local controllers for each subsystem to enforce local dissipativity guarantees, which are then exploited to co-design distributed global controllers and the interconnection topology to enforce global dissipativity guarantees while optimizing interconnection topology costs. The overall design process requires only solving a sequence of linear matrix inequality (LMI) problems, thereby retaining compositionality and decentralizability while avoiding non-convex, iterative design processes that are inefficient and centralized. This model-based hierarchical control design strategy assumes the knowledge of the subsystem dynamics, which may not hold in many real-world networked systems. Motivated by this, we also propose a data-driven hierarchical control design strategy that assumes only the availability of rich input-state-output trajectory data from the subsystems. The proposed data-driven design process assumes that the unknown disturbances affecting the subsystem dynamics are bounded by a quadratic matrix inequality (relaxing conventional bounds) and accounts for this by using the matrix S-lemma. Finally, the effectiveness of the proposed model-based and data-driven hierarchical control designs is illustrated for a networked system representing a DC microgrid, with the aim of enforcing robust (dissipative) voltage regulation and current sharing.
Modeling PWM-Time-SOC Interaction in a Simulated Robot
Feb 27, 2026Accurate prediction of battery state of charge is needed for autonomous robots to plan movements without using up all available power. This work develops a physics and data-informed model from a simulation that predicts SOC depletion as a function of time and PWM duty cycle for a simulated 4-wheel Arduino robot. A forward-motion simulation incorporating motor electrical characteristics (resistance, inductance, back-EMF, torque constant) and mechanical dynamics (mass, drag, rolling resistance, wheel radius) was used to generate SOC time-series data across PWM values from 1-100%. Sparse Identification of Nonlinear Dynamics (SINDy), combined with least-squares regression, was applied to construct a unified nonlinear model that captures SOC(t, p). The framework allows for energy-aware planning for similar robots and can be extended to incorporate arbitrary initial SOC levels and environment-dependent parameters for real-world deployment.
Robust Approximate Simulation for Hierarchical Control of Piecewise Affine Systems under Bounded Disturbances
Mar 04, 2022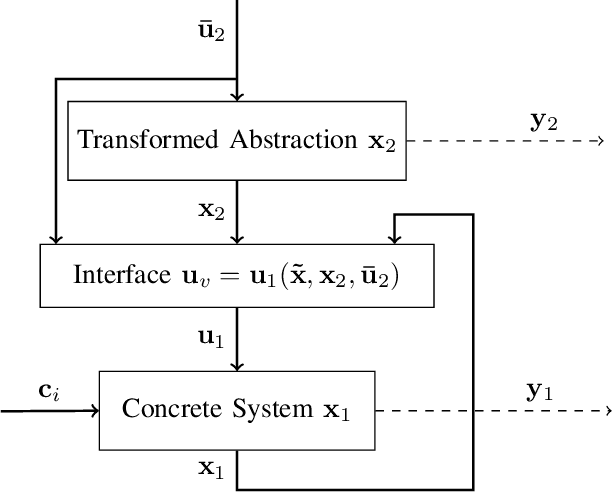
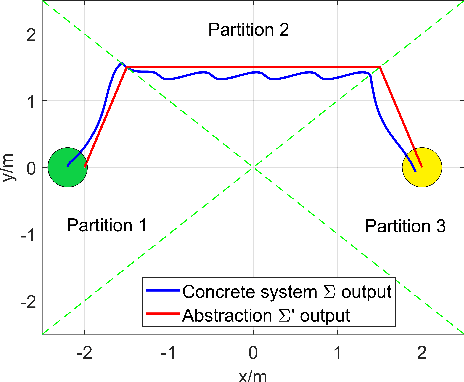
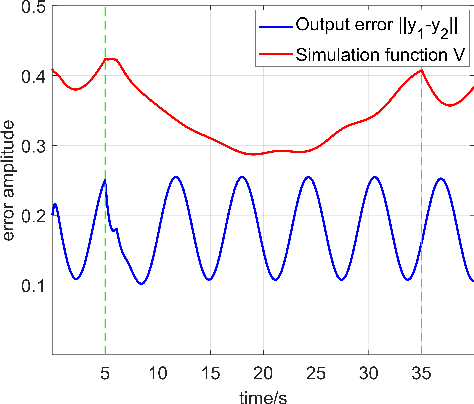
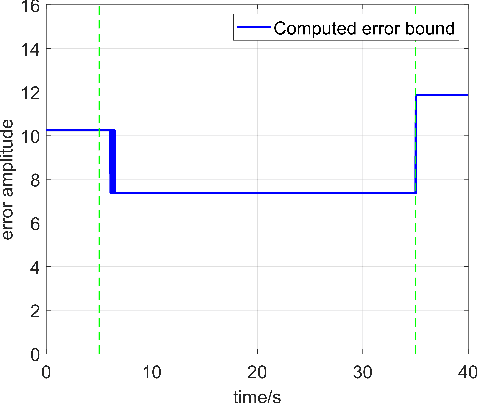
Piecewise affine (PWA) systems are widely applied in many practical cases such as the control of nonlinear systems and hybrid dynamics. However, most of the existing PWA control methods have poor scalability with respect to the number of modes and system dimensions and may not be robust to the disturbances in performance. In this paper, we present a robust approximate simulation based control method for PWA systems under bounded external disturbances. First, a lower-dimensional linear system (abstraction) and an associated interface are designed to enable the output of the PWA system (concrete system) to track the output of the abstraction. Then, a Lyapunov-like simulation function is designed to show the boundedness of the output errors between the two systems. Furthermore, the results obtained for linear abstraction are extended to the case that a simpler PWA system is the abstraction. To illustrate the effectiveness of the proposed approach, simulation results are provided for two design examples.