 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRange-SLAM: Ultra-Wideband-Based Smoke-Resistant Real-Time Localization and Mapping
Sep 15, 2024



This paper presents Range-SLAM, a real-time, lightweight SLAM system designed to address the challenges of localization and mapping in environments with smoke and other harsh conditions using Ultra-Wideband (UWB) signals. While optical sensors like LiDAR and cameras struggle in low-visibility environments, UWB signals provide a robust alternative for real-time positioning. The proposed system uses general UWB devices to achieve accurate mapping and localization without relying on expensive LiDAR or other dedicated hardware. By utilizing only the distance and Received Signal Strength Indicator (RSSI) provided by UWB sensors in relation to anchors, we combine the motion of the tag-carrying agent with raycasting algorithm to construct a 2D occupancy grid map in real time. To enhance localization in challenging conditions, a Weighted Least Squares (WLS) method is employed. Extensive real-world experiments, including smoke-filled environments and simulated
LVCP: LiDAR-Vision Tightly Coupled Collaborative Real-time Relative Positioning
Jul 15, 2024



In air-ground collaboration scenarios without GPS and prior maps, the relative positioning of drones and unmanned ground vehicles (UGVs) has always been a challenge. For a drone equipped with monocular camera and an UGV equipped with LiDAR as an external sensor, we propose a robust and real-time relative pose estimation method (LVCP) based on the tight coupling of vision and LiDAR point cloud information, which does not require prior information such as maps or precise initial poses. Given that large-scale point clouds generated by 3D sensors has more accurate spatial geometric information than the feature point cloud generated by image, we utilize LiDAR point clouds to correct the drift in visual-inertial odometry (VIO) when the camera undergoes significant shaking or the IMU has a low signal-to-noise ratio. To achieve this, we propose a novel coarse-to-fine framework for LiDAR-vision collaborative localization. In this framework, we construct point-plane association based on spatial geometric information, and innovatively construct a point-aided Bundle Adjustment (BA) problem as the backend to simultaneously estimate the relative pose of the camera and LiDAR and correct the VIO drift. In this process, we propose a particle swarm optimization (PSO) based sampling algorithm to complete the coarse estimation of the current camera-LiDAR pose. In this process, the initial pose of the camera used for sampling is obtained based on VIO propagation, and the valid feature-plane association number (VFPN) is used to trigger PSO-sampling process. Additionally, we propose a method that combines Structure from Motion (SFM) and multi-level sampling to initialize the algorithm, addressing the challenge of lacking initial values.
RH-Map: Online Map Construction Framework of Dynamic Objects Removal Based on Region-wise Hash Map Structure
Jul 02, 2023



Mobile robots operating in outdoor environments frequently encounter the issue of undesired traces left by dynamic objects and manifested as obstacles on the map, impeding the robot's ability to achieve accurate localization and navigation performance. To address this problem, we present a novel online map construction framework called RH-Map. Our framework leverages a newly proposed 3D region-wise hash map data structure for efficiently removing dynamic objects in real-time. It comprises a real-time dynamic object removal front-end module S2M-R and a lightweight back-end module for further removal. We conducted extensive experiments on the SemanticKITTI dataset, and the results demonstrate that our proposed method performs favorably compared to state-of-the-art approaches, and we further validated the proposed framework in real-world environment. The source code is released and available for the community.
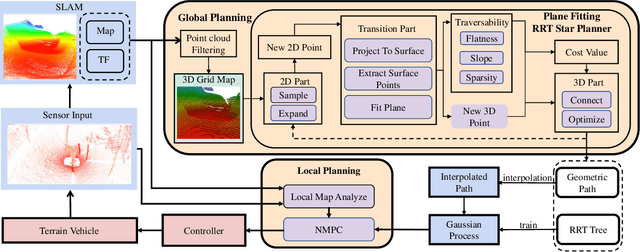
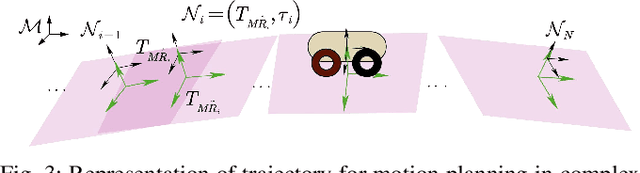
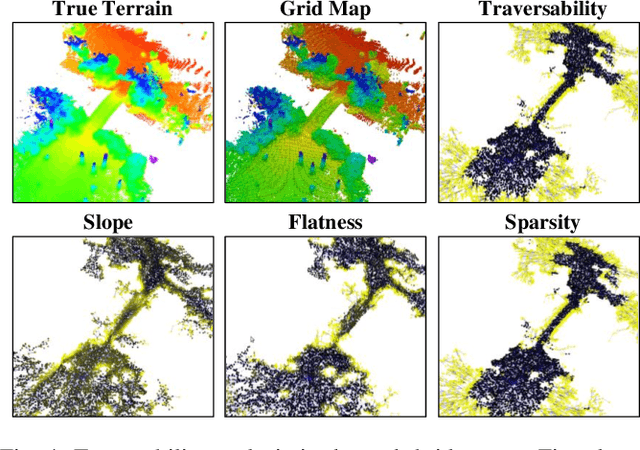
Path Generation for Wheeled Robots Autonomous Navigation on Vegetated Terrain
Jun 15, 2023



Wheeled robot navigation has been widely used in urban environments, but little research has been conducted on its navigation in wild vegetation. External sensors (LiDAR, camera etc.) are often used to construct point cloud map of the surrounding environment, however, the supporting rigid ground used for travelling cannot be detected due to the occlusion of vegetation. This often causes unsafe or not smooth path during planning process. To address the drawback, we propose the PE-RRT* algorithm, which effectively combines a novel support plane estimation method and sampling algorithm to generate real-time feasible and safe path in vegetation environments. In order to accurately estimate the support plane, we combine external perception and proprioception, and use Multivariate Gaussian Processe Regression (MV-GPR) to estimate the terrain at the sampling nodes. We build a physical experimental platform and conduct experiments in different outdoor environments. Experimental results show that our method has high safety, robustness and generalization.
Hybrid Trajectory Optimization for Autonomous Terrain Traversal of Articulated Tracked Robots
Jun 05, 2023



Autonomous terrain traversal of articulated tracked robots can reduce operator cognitive load to enhance task efficiency and facilitate extensive deployment. We present a novel hybrid trajectory optimization method aimed at generating smooth, stable, and efficient traversal motions. To achieve this, we develop a planar robot-terrain interaction model and partition the robot's motion into hybrid modes of driving and traversing. By using a generalized coordinate description, the configuration space dimension is reduced, which provides real-time planning capability. The hybrid trajectory optimization is transcribed into a nonlinear programming problem and solved in a receding-horizon planning fashion. Mode switching is facilitated by associating optimized motion durations with a predefined traversal sequence. A multi-objective cost function is formulated to further improve the traversal performance. Additionally, map sampling, terrain simplification, and tracking controller modules are integrated into the autonomous terrain traversal system. Our approach is validated in simulation and real-world experiments with the Searcher robotic platform, effectively achieving smooth and stable motion with high time and energy efficiency compared to expert operator control.
Dynamic Control Barrier Function-based Model Predictive Control to Safety-Critical Obstacle-Avoidance of Mobile Robot
Sep 18, 2022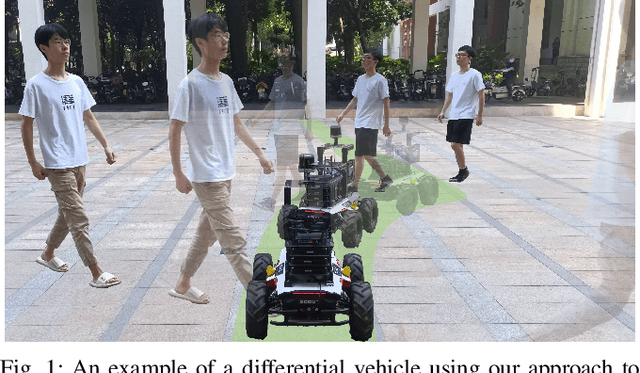
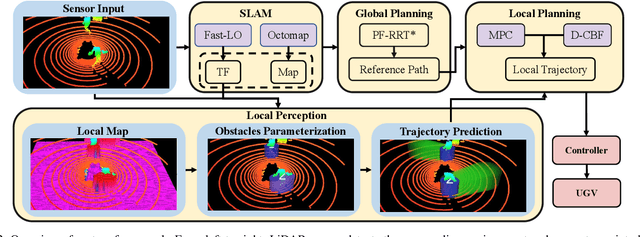
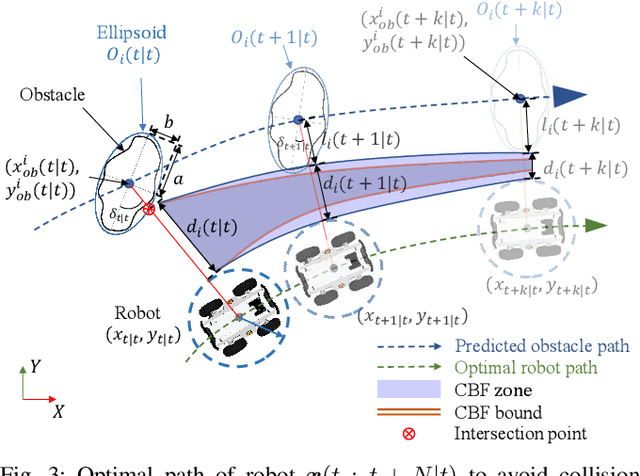
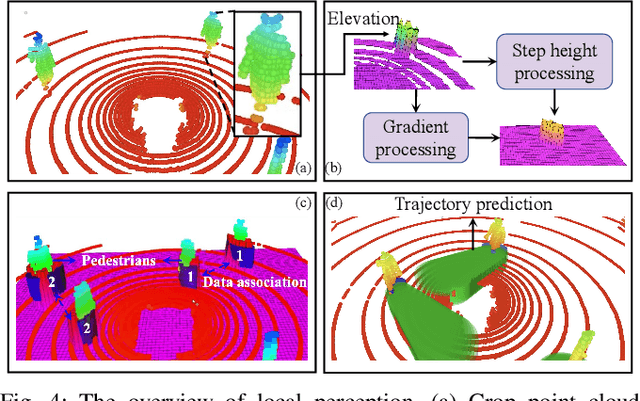
This paper presents an efficient and safe method to avoid static and dynamic obstacles based on LiDAR. First, point cloud is used to generate a real-time local grid map for obstacle detection. Then, obstacles are clustered by DBSCAN algorithm and enclosed with minimum bounding ellipses (MBEs). In addition, data association is conducted to match each MBE with the obstacle in the current frame. Considering MBE as an observation, Kalman filter (KF) is used to estimate and predict the motion state of the obstacle. In this way, the trajectory of each obstacle in the forward time domain can be parameterized as a set of ellipses. Due to the uncertainty of the MBE, the semi-major and semi-minor axes of the parameterized ellipse are extended to ensure safety. We extend the traditional Control Barrier Function (CBF) and propose Dynamic Control Barrier Function (D-CBF). We combine D-CBF with Model Predictive Control (MPC) to implement safety-critical dynamic obstacle avoidance. Experiments in simulated and real scenarios are conducted to verify the effectiveness of our algorithm. The source code is released for the reference of the community.
PUTN: A Plane-fitting based Uneven Terrain Navigation Framework
Mar 09, 2022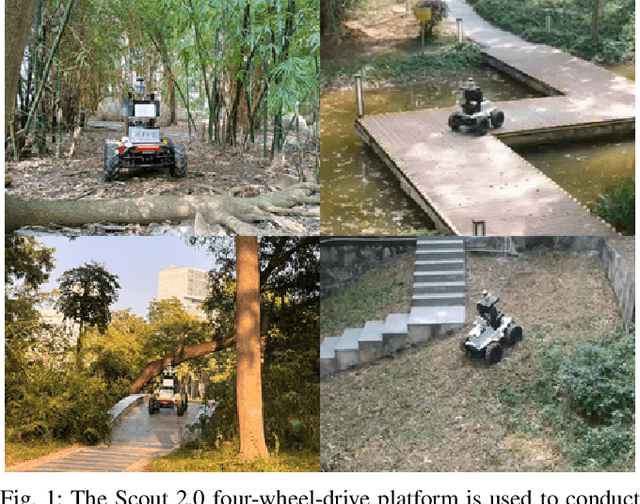
Autonomous navigation of ground robots has been widely used in indoor structured 2D environments, but there are still many challenges in outdoor 3D unstructured environments, especially in rough, uneven terrains. This paper proposed a plane-fitting based uneven terrain navigation framework (PUTN) to solve this problem. The implementation of PUTN is divided into three steps. First, based on Rapidly-exploring Random Trees (RRT), an improved sample-based algorithm called Plane Fitting RRT* (PF-RRT*) is proposed to obtain a sparse trajectory. Each sampling point corresponds to a custom traversability index and a fitted plane on the point cloud. These planes are connected in series to form a traversable strip. Second, Gaussian Process Regression is used to generate traversability of the dense trajectory interpolated from the sparse trajectory, and the sampling tree is used as the training set. Finally, local planning is performed using nonlinear model predictive control (NMPC). By adding the traversability index and uncertainty to the cost function, and adding obstacles generated by the real-time point cloud to the constraint function, a safe motion planning algorithm with smooth speed and strong robustness is available. Experiments in real scenarios are conducted to verify the effectiveness of the method.
Quadruped Guidance Robot for the Visually Impaired: A Comfort-Based Approach
Mar 08, 2022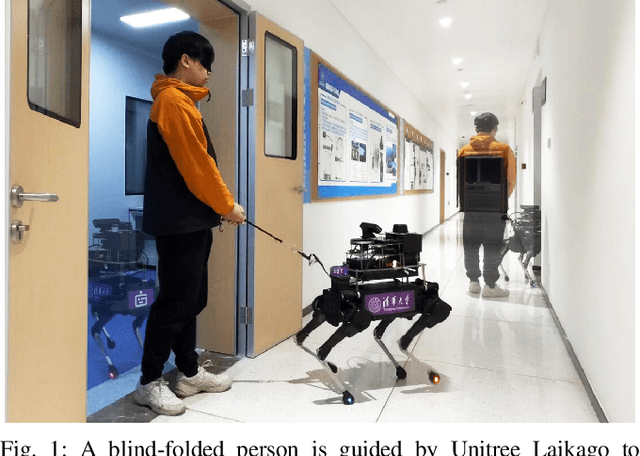
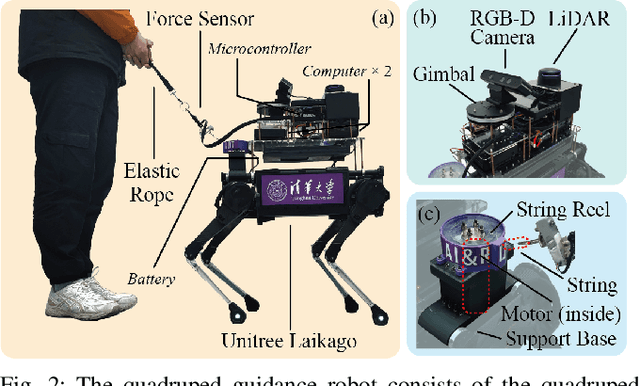
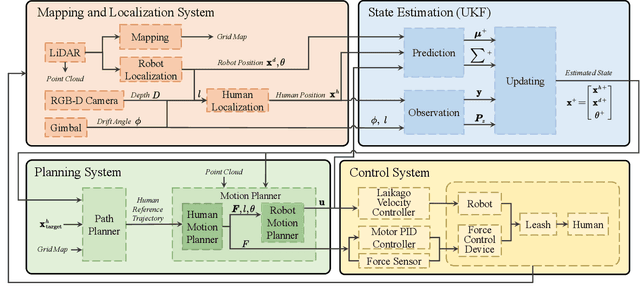
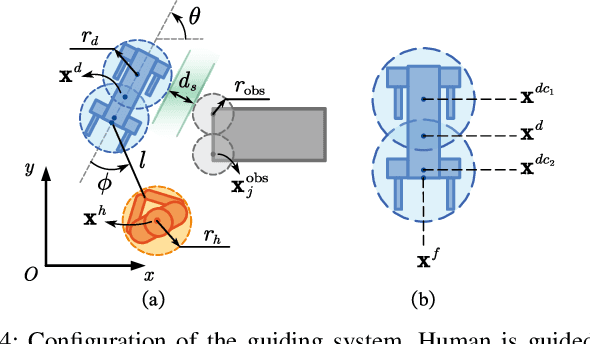
A quadrupedal guidance robot that can guide people and avoid various obstacles, could potentially be owned by more visually impaired people at a fairly low cost. In this paper, we propose a novel guidance robot system with a comfort-based concept. We design a leash containing an elastic rope and a thin string, and use a motor to adjust the length of the string to ensure comfort. We use the force-based human motion model to plan the forces experienced by the human. Afterward, the direction and magnitude of the force are controlled by the motion of the robot, and the rotation of the motor, respectively. This allows humans to be guided safely and more comfortably to the target position in complex environments. The system has been deployed on Unitree Laikago quadrupedal platform and validated in real-world scenarios.