 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensingAgents: A Multi-Agent Collaborative Framework for Robust IMU Activity Recognition
May 06, 2026Human Activity Recognition (HAR) using Inertial Measurement Unit (IMU) sensors is a cornerstone of mobile health, smart environments, and human-computer interaction. However, current deep learning-based HAR models often struggle with heavy reliance on labeled data, position-specific ambiguity, and a lack of transparent reasoning. Inspired by the advanced agents framework, which emulates a collaborative agent using Large Language Models (LLMs), we propose SensingAgents, a novel multi-agent system for robust IMU activity recognition. SensingAgents organizes LLM-powered agents into specialized roles: a group of Analyst Agents for position-specific sensor analysis (arm, wrist, belt, pocket), a pair of Advocate Agents that resolves sensor conflicts through dynamic and static dialectical debates, and a Decision Agent that ensures reliability under sensor drift or failure. Evaluation on the Shoaib dataset demonstrates that SensingAgents significantly outperforms state-of-the-art single-agent and multi-agent LLM models, achieving an accuracy of 79.5% in a zero setting--29% higher than existing agent models and 9.4% higher than deep learning baselines--particularly in complex scenarios where multi-sensor data is conflicting or noisy. Our work highlights the potential of multi-agent collaborative reasoning for advancing the robustness and interpretability of ubiquitous sensing systems.
mmSpyVR: Exploiting mmWave Radar for Penetrating Obstacles to Uncover Privacy Vulnerability of Virtual Reality
Nov 15, 2024



Virtual reality (VR), while enhancing user experiences, introduces significant privacy risks. This paper reveals a novel vulnerability in VR systems that allows attackers to capture VR privacy through obstacles utilizing millimeter-wave (mmWave) signals without physical intrusion and virtual connection with the VR devices. We propose mmSpyVR, a novel attack on VR user's privacy via mmWave radar. The mmSpyVR framework encompasses two main parts: (i) A transfer learning-based feature extraction model to achieve VR feature extraction from mmWave signal. (ii) An attention-based VR privacy spying module to spy VR privacy information from the extracted feature. The mmSpyVR demonstrates the capability to extract critical VR privacy from the mmWave signals that have penetrated through obstacles. We evaluate mmSpyVR through IRB-approved user studies. Across 22 participants engaged in four experimental scenes utilizing VR devices from three different manufacturers, our system achieves an application recognition accuracy of 98.5\% and keystroke recognition accuracy of 92.6\%. This newly discovered vulnerability has implications across various domains, such as cybersecurity, privacy protection, and VR technology development. We also engage with VR manufacturer Meta to discuss and explore potential mitigation strategies. Data and code are publicly available for scrutiny and research at https://github.com/luoyumei1-a/mmSpyVR/
ESP-PCT: Enhanced VR Semantic Performance through Efficient Compression of Temporal and Spatial Redundancies in Point Cloud Transformers
Sep 02, 2024



Semantic recognition is pivotal in virtual reality (VR) applications, enabling immersive and interactive experiences. A promising approach is utilizing millimeter-wave (mmWave) signals to generate point clouds. However, the high computational and memory demands of current mmWave point cloud models hinder their efficiency and reliability. To address this limitation, our paper introduces ESP-PCT, a novel Enhanced Semantic Performance Point Cloud Transformer with a two-stage semantic recognition framework tailored for VR applications. ESP-PCT takes advantage of the accuracy of sensory point cloud data and optimizes the semantic recognition process, where the localization and focus stages are trained jointly in an end-to-end manner. We evaluate ESP-PCT on various VR semantic recognition conditions, demonstrating substantial enhancements in recognition efficiency. Notably, ESP-PCT achieves a remarkable accuracy of 93.2% while reducing the computational requirements (FLOPs) by 76.9% and memory usage by 78.2% compared to the existing Point Transformer model simultaneously. These underscore ESP-PCT's potential in VR semantic recognition by achieving high accuracy and reducing redundancy. The code and data of this project are available at \url{https://github.com/lymei-SEU/ESP-PCT}.
Partial Symbol Recovery for Interference Resilience in Low-Power Wide Area Networks
Sep 08, 2021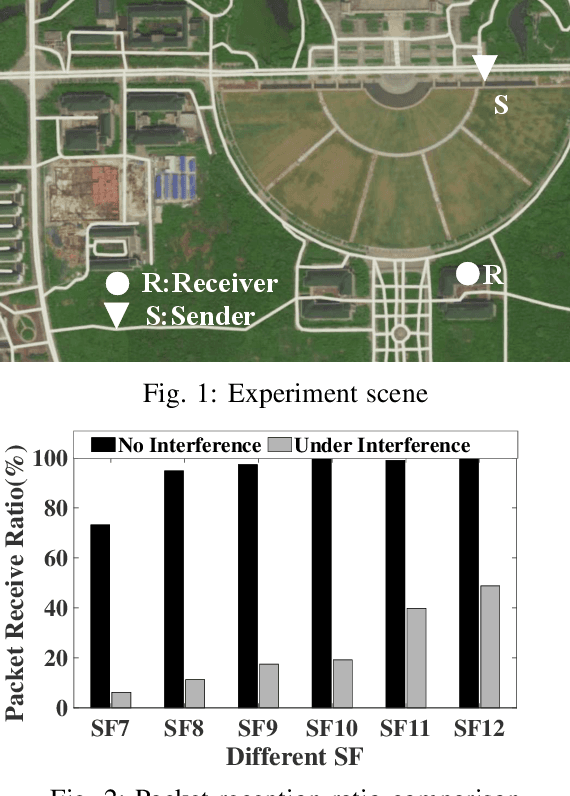
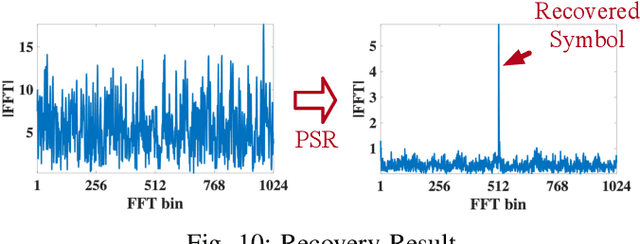
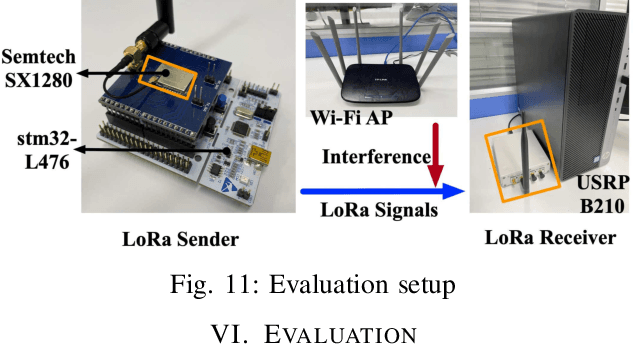
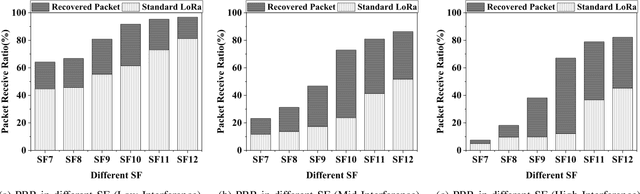
Recent years have witnessed the proliferation of Low-power Wide Area Networks (LPWANs) in the unlicensed band for various Internet-of-Things (IoT) applications. Due to the ultra-low transmission power and long transmission duration, LPWAN devices inevitably suffer from high power Cross Technology Interference (CTI), such as interference from Wi-Fi, coexisting in the same spectrum. To alleviate this issue, this paper introduces the Partial Symbol Recovery (PSR) scheme for improving the CTI resilience of LPWAN. We verify our idea on LoRa, a widely adopted LPWAN technique, as a proof of concept. At the PHY layer, although CTI has much higher power, its duration is relatively shorter compared with LoRa symbols, leaving part of a LoRa symbol uncorrupted. Moreover, due to its high redundancy, LoRa chips within a symbol are highly correlated. This opens the possibility of detecting a LoRa symbol with only part of the chips. By examining the unique frequency patterns in LoRa symbols with time-frequency analysis, our design effectively detects the clean LoRa chips that are free of CTI. This enables PSR to only rely on clean LoRa chips for successfully recovering from communication failures. We evaluate our PSR design with real-world testbeds, including SX1280 LoRa chips and USRP B210, under Wi-Fi interference in various scenarios. Extensive experiments demonstrate that our design offers reliable packet recovery performance, successfully boosting the LoRa packet reception ratio from 45.2% to 82.2% with a performance gain of 1.8 times.