 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Cloud Data Fusion for ADAS: A Lane Change Prediction Case Study
Dec 07, 2021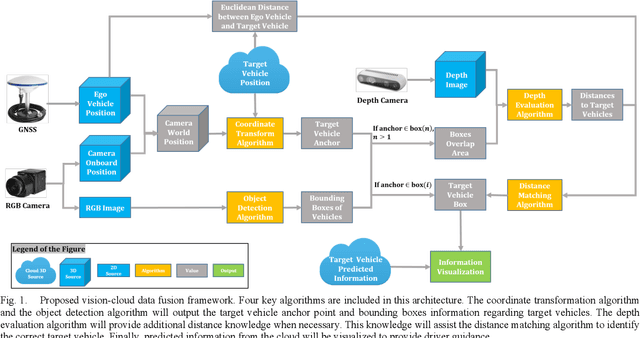
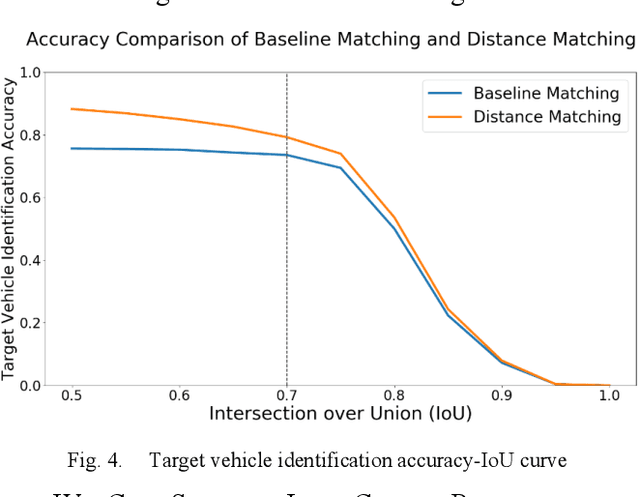
With the rapid development of intelligent vehicles and Advanced Driver-Assistance Systems (ADAS), a new trend is that mixed levels of human driver engagements will be involved in the transportation system. Therefore, necessary visual guidance for drivers is vitally important under this situation to prevent potential risks. To advance the development of visual guidance systems, we introduce a novel vision-cloud data fusion methodology, integrating camera image and Digital Twin information from the cloud to help intelligent vehicles make better decisions. Target vehicle bounding box is drawn and matched with the help of the object detector (running on the ego-vehicle) and position information (received from the cloud). The best matching result, a 79.2% accuracy under 0.7 intersection over union threshold, is obtained with depth images served as an additional feature source. A case study on lane change prediction is conducted to show the effectiveness of the proposed data fusion methodology. In the case study, a multi-layer perceptron algorithm is proposed with modified lane change prediction approaches. Human-in-the-loop simulation results obtained from the Unity game engine reveal that the proposed model can improve highway driving performance significantly in terms of safety, comfort, and environmental sustainability.
Multi-Agent Reinforcement Learning for Dynamic Routing Games: A Unified Paradigm
Nov 22, 2020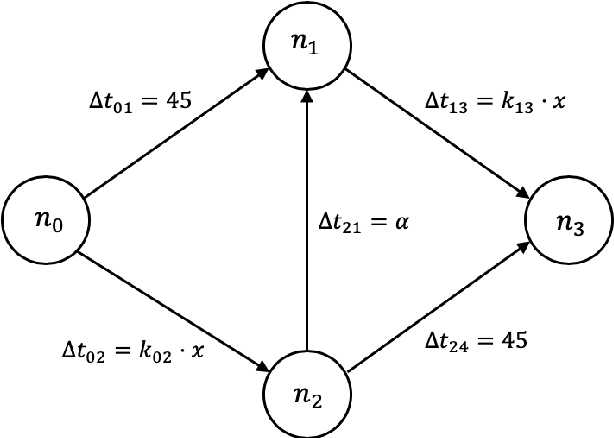
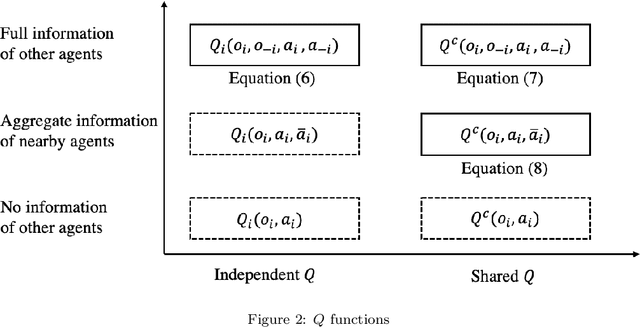
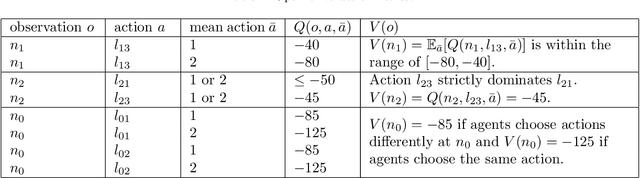
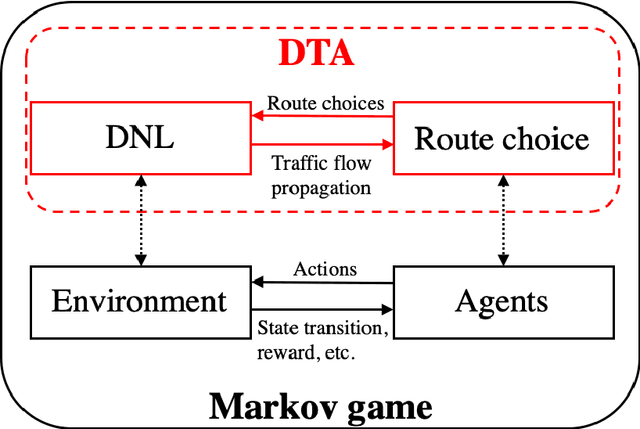
This paper aims to develop a unified paradigm that models one's learning behavior and the system's equilibrating processes in a routing game among atomic selfish agents. Such a paradigm can assist policymakers in devising optimal operational and planning countermeasures under both normal and abnormal circumstances. To this end, a multi-agent reinforcement learning (MARL) paradigm is proposed in which each agent learns and updates her own en-route path choice policy while interacting with others on transportation networks. This paradigm is shown to generalize the classical notion of dynamic user equilibrium (DUE) to model-free and data-driven scenarios. We also illustrate that the equilibrium outcomes computed from our developed MARL paradigm coincide with DUE and dynamic system optimal (DSO), respectively, when rewards are set differently. In addition, with the goal to optimize some systematic objective (e.g., overall traffic condition) of city planners, we formulate a bilevel optimization problem with the upper level as city planners and the lower level as a multi-agent system where each rational and selfish traveler aims to minimize her travel cost. We demonstrate the effect of two administrative measures, namely tolling and signal control, on the behavior of travelers and show that the systematic objective of city planners can be optimized by a proper control. The results show that on the Braess network, the optimal toll charge on the central link is greater or equal to 25, with which the average travel time of selfish agents is minimized and the emergence of Braess paradox could be avoided. In a large-sized real-world road network with 69 nodes and 166 links, the optimal offset for signal control on Broadway is derived as 4 seconds, with which the average travel time of all controllable agents is minimized.
Sensor Fusion of Camera and Cloud Digital Twin Information for Intelligent Vehicles
Jul 08, 2020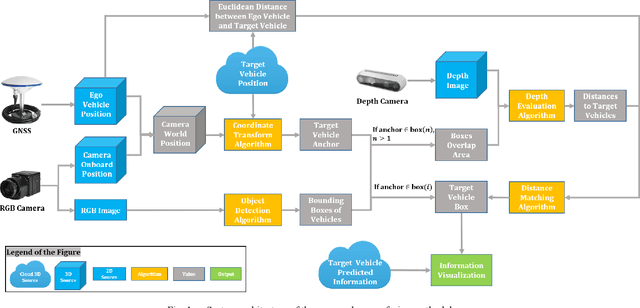
With the rapid development of intelligent vehicles and Advanced Driving Assistance Systems (ADAS), a mixed level of human driver engagements is involved in the transportation system. Visual guidance for drivers is essential under this situation to prevent potential risks. To advance the development of visual guidance systems, we introduce a novel sensor fusion methodology, integrating camera image and Digital Twin knowledge from the cloud. Target vehicle bounding box is drawn and matched by combining results of object detector running on ego vehicle and position information from the cloud. The best matching result, with a 79.2% accuracy under 0.7 Intersection over Union (IoU) threshold, is obtained with depth image served as an additional feature source. Game engine-based simulation results also reveal that the visual guidance system could improve driving safety significantly cooperate with the cloud Digital Twin system.
Long-Term Prediction of Lane Change Maneuver Through a Multilayer Perceptron
Jun 23, 2020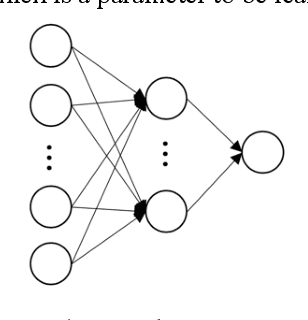
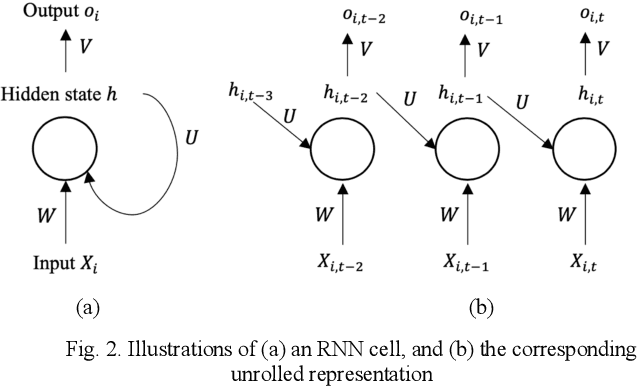
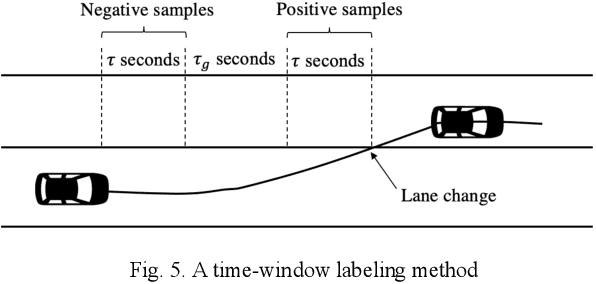
Behavior prediction plays an essential role in both autonomous driving systems and Advanced Driver Assistance Systems (ADAS), since it enhances vehicle's awareness of the imminent hazards in the surrounding environment. Many existing lane change prediction models take as input lateral or angle information and make short-term (< 5 seconds) maneuver predictions. In this study, we propose a longer-term (5~10 seconds) prediction model without any lateral or angle information. Three prediction models are introduced, including a logistic regression model, a multilayer perceptron (MLP) model, and a recurrent neural network (RNN) model, and their performances are compared by using the real-world NGSIM dataset. To properly label the trajectory data, this study proposes a new time-window labeling scheme by adding a time gap between positive and negative samples. Two approaches are also proposed to address the unstable prediction issue, where the aggressive approach propagates each positive prediction for certain seconds, while the conservative approach adopts a roll-window average to smooth the prediction. Evaluation results show that the developed prediction model is able to capture 75% of real lane change maneuvers with an average advanced prediction time of 8.05 seconds.
Reward Design for Driver Repositioning Using Multi-Agent Reinforcement Learning
Feb 29, 2020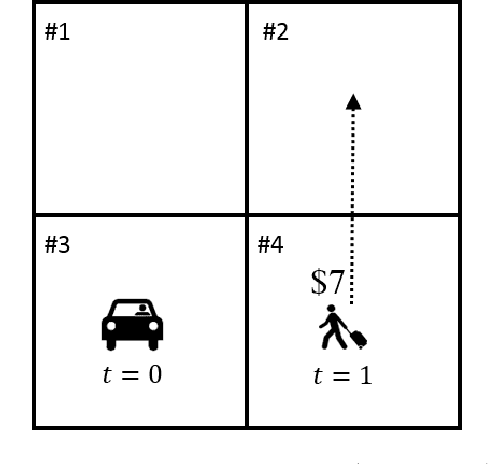

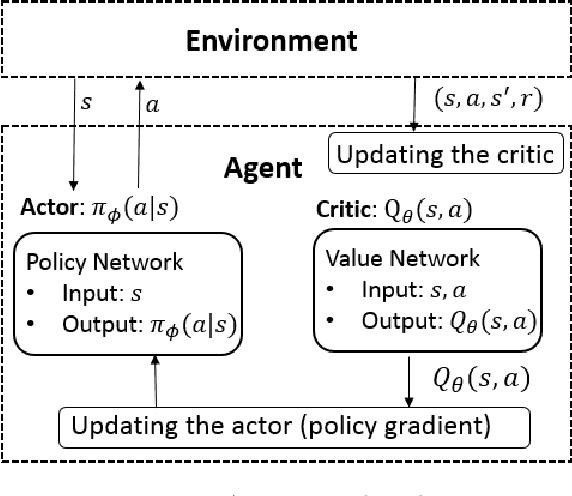

A large portion of passenger requests is reportedly unserviced, partially due to vacant for-hire drivers' cruising behavior during the passenger seeking process. This paper aims to model the multi-driver repositioning task through a mean field multi-agent reinforcement learning (MARL) approach that captures competition among multiple agents. Because the direct application of MARL to the multi-driver system under a given reward mechanism will likely yield a suboptimal equilibrium due to the selfishness of drivers, this study proposes an reward design scheme with which a more desired equilibrium can be reached. To effectively solve the bilevel optimization problem with upper level as the reward design and the lower level as a multi-agent system, a Bayesian optimization (BO) algorithm is adopted to speed up the learning process. We then apply the bilevel optimization model to two case studies, namely, e-hailing driver repositioning under service charge and multiclass taxi driver repositioning under NYC congestion pricing. In the first case study, the model is validated by the agreement between the derived optimal control from BO and that from an analytical solution. With a simple piecewise linear service charge, the objective of the e-hailing platform can be increased by 4.0%. In the second case study, an optimal toll charge of $5.1 is solved using BO, which improves the objective of city planners by 7.9%, compared to that without any toll charge. Under this optimal toll charge, the number of taxis in the NYC central business district is decreased, indicating a better traffic condition, without substantially increasing the crowdedness of the subway system.
Where to Find Next Passengers on E-hailing Platforms? - A Markov Decision Process Approach
May 23, 2019
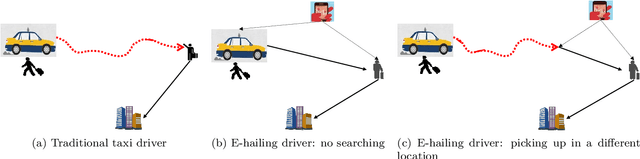
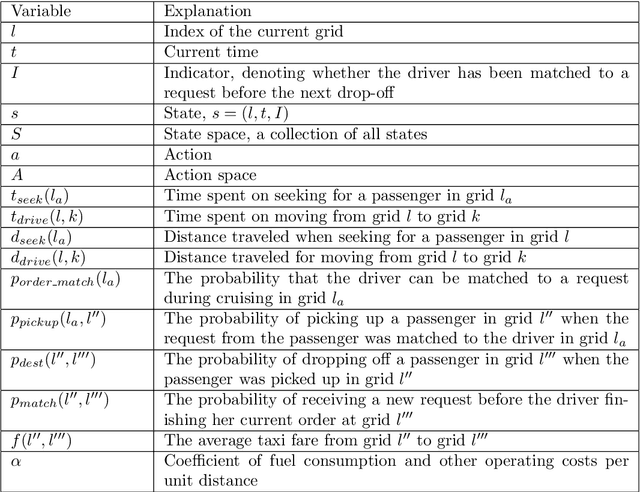
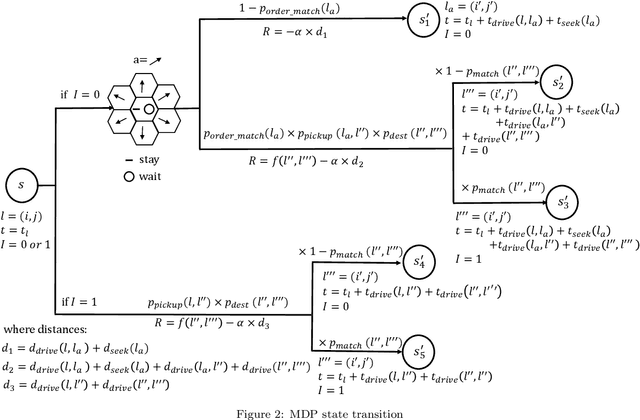
Vacant taxi drivers' passenger seeking process in a road network generates additional vehicle miles traveled, adding congestion and pollution into the road network and the environment. This paper aims to employ a Markov Decision Process (MDP) to model idle e-hailing drivers' optimal sequential decisions in passenger-seeking. Transportation network companies (TNC) or e-hailing (e.g., Didi, Uber) drivers exhibit different behaviors from traditional taxi drivers because e-hailing drivers do not need to actually search for passengers. Instead, they reposition themselves so that the matching platform can match a passenger. Accordingly, we incorporate e-hailing drivers' new features into our MDP model. We then use 44,160 Didi drivers' 3-day trajectories to train the model. To validate the effectiveness of the model, a Monte Carlo simulation is conducted to simulate the performance of drivers under the guidance of the optimal policy, which is then compared with the performance of drivers following one baseline heuristic, namely, the local hotspot strategy. The results show that our model is able to achieve a 26% improvement over the local hotspot strategy in terms of the rate of return. The proposed MDP model captures the supply-demand ratio considering the fact that the number of drivers in this study is sufficiently large and thus the number of unmatched orders is assumed to be negligible. To better incorporate the competition among multiple drivers into the model, we have also devised and calibrated a dynamic adjustment strategy of the order matching probability.