 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere to Find Next Passengers on E-hailing Platforms? - A Markov Decision Process Approach
May 23, 2019
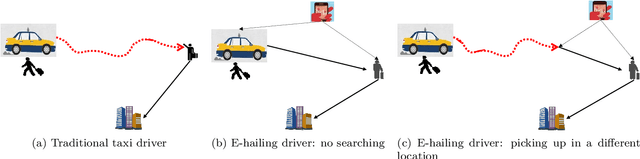
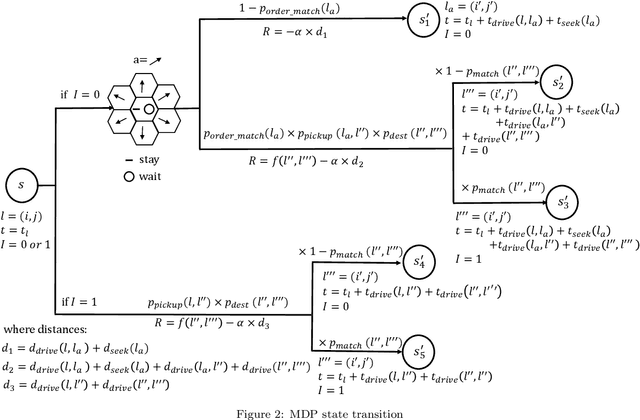
Vacant taxi drivers' passenger seeking process in a road network generates additional vehicle miles traveled, adding congestion and pollution into the road network and the environment. This paper aims to employ a Markov Decision Process (MDP) to model idle e-hailing drivers' optimal sequential decisions in passenger-seeking. Transportation network companies (TNC) or e-hailing (e.g., Didi, Uber) drivers exhibit different behaviors from traditional taxi drivers because e-hailing drivers do not need to actually search for passengers. Instead, they reposition themselves so that the matching platform can match a passenger. Accordingly, we incorporate e-hailing drivers' new features into our MDP model. We then use 44,160 Didi drivers' 3-day trajectories to train the model. To validate the effectiveness of the model, a Monte Carlo simulation is conducted to simulate the performance of drivers under the guidance of the optimal policy, which is then compared with the performance of drivers following one baseline heuristic, namely, the local hotspot strategy. The results show that our model is able to achieve a 26% improvement over the local hotspot strategy in terms of the rate of return. The proposed MDP model captures the supply-demand ratio considering the fact that the number of drivers in this study is sufficiently large and thus the number of unmatched orders is assumed to be negligible. To better incorporate the competition among multiple drivers into the model, we have also devised and calibrated a dynamic adjustment strategy of the order matching probability.
A Statistical Method for Parking Spaces Occupancy Detection via Automotive Radars
Nov 16, 2016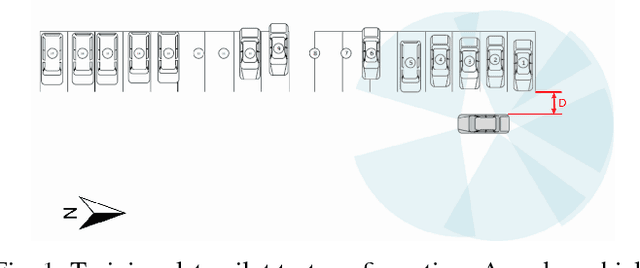
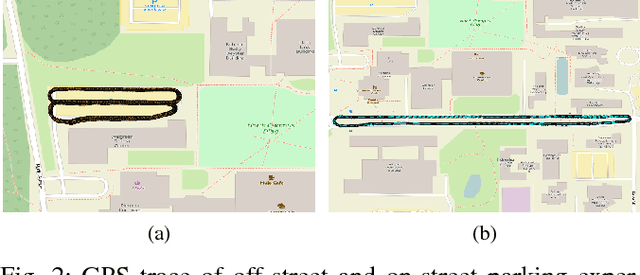
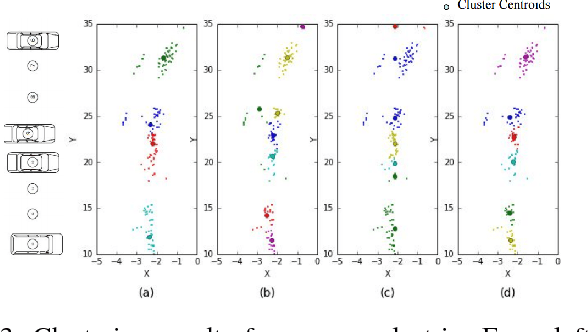
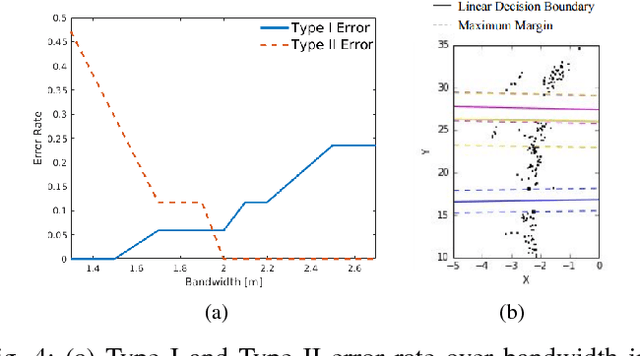
Real-time parking occupancy information is valuable for guiding drivers' searching for parking spaces. Recently many parking detection systems using range-based on-vehicle sensors are invented, but they disregard the practical difficulty of obtaining access to raw sensory data which are required for any feature-based algorithm. In this paper, we focus on a system using short-range radars (SRR) embedded in Advanced Driver Assistance System (ADAS) to collect occupancy information, and broadcast it through a connected vehicle network. The challenge that the data transmitted through ADAS unit has been encoded to sparse points is overcome by a statistical method instead of feature extractions. We propose a two-step classification algorithm combining Mean-Shift clustering and Support Vector Machine to analyze SRR-GPS data, and evaluate it through field experiments. The results show that the average Type I error rate for off-street parking is $15.23 \%$ and for on-street parking is $32.62\%$. In both cased the Type II error rates are less than $20 \%$. Bayesian updating can recursively improve the mapping results. This paper can provide a comprehensive method to elevate automotive sensors for the parking detection function.
An Evaluation of Information Sharing Parking Guidance Policies Using a Bayesian Approach
Nov 14, 2016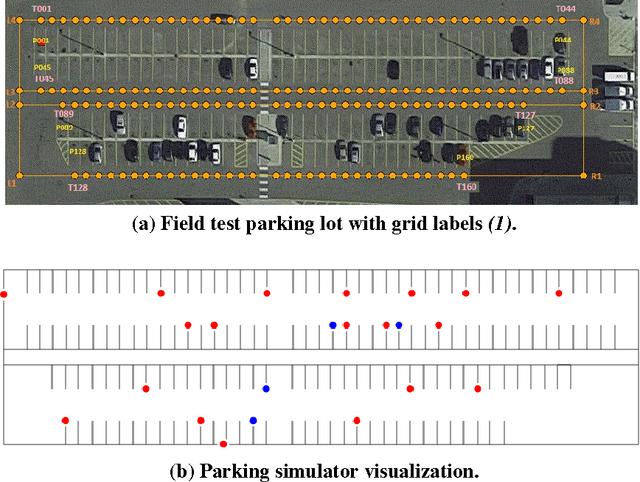
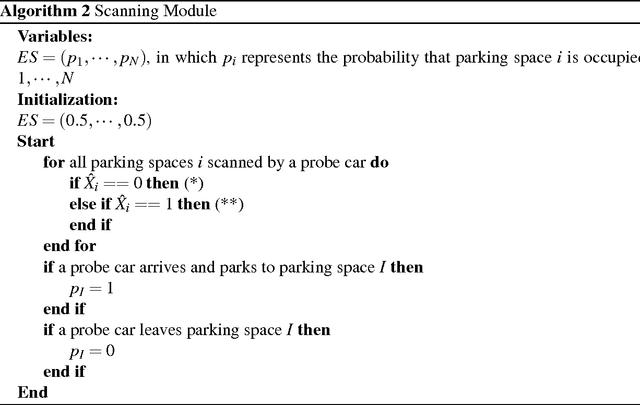
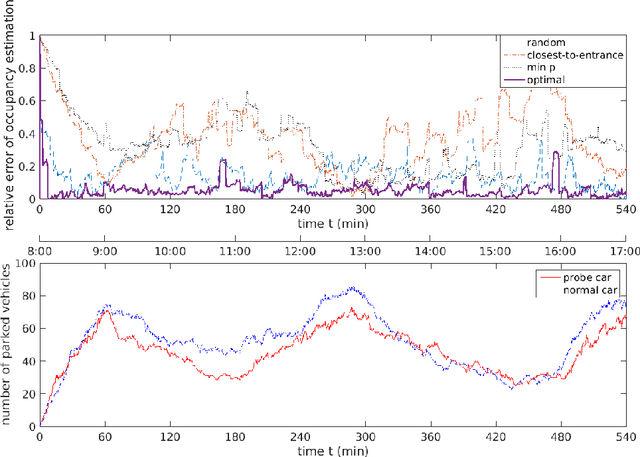
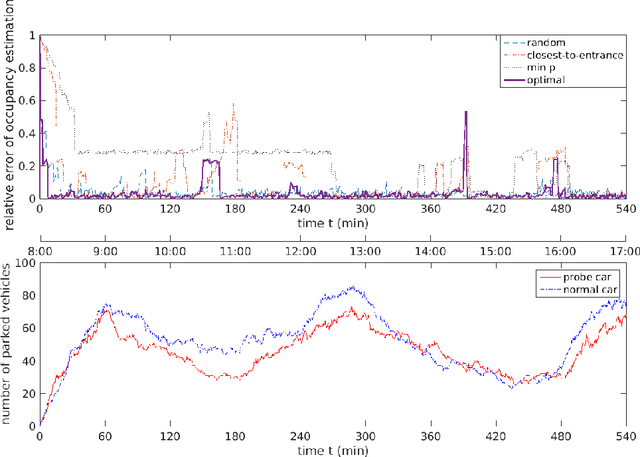
Real-time parking occupancy information is critical for a parking management system to facilitate drivers to park more efficiently. Recent advances in connected and automated vehicle technologies enable sensor-equipped cars (probe cars) to detect and broadcast available parking spaces when driving through parking lots. In this paper, we evaluate the impact of market penetration of probe cars on the system performance, and investigate different parking guidance policies to improve the data acquisition process. We adopt a simulation-based approach to impose four policies on an off- street parking lot influencing the behavior of probe cars to park in assigned parking spaces. This in turn effects the scanning route and the parking space occupancy estimations. The last policy we propose is a near-optimal guidance strategy that maximizes the information gain of posteriors. The results suggest that an efficient information gathering policy can compensate for low penetration of connected and automated vehicles. We also highlight the policy trade-off that occur while attempting to maximize information gain through explorations and improve assignment accuracy through exploitations. Our results can assist urban policy makers in designing and managing smart parking systems.