 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-reality Location Privacy Protection in 6G-enabled Vehicular Metaverses: An LLM-enhanced Hybrid Generative Diffusion Model-based Approach
Jan 18, 2026The emergence of 6G-enabled vehicular metaverses enables Autonomous Vehicles (AVs) to operate across physical and virtual spaces through space-air-ground-sea integrated networks. The AVs can deploy AI agents powered by large AI models as personalized assistants, on edge servers to support intelligent driving decision making and enhanced on-board experiences. However, such cross-reality interactions may cause serious location privacy risks, as adversaries can infer AV trajectories by correlating the location reported when AVs request LBS in reality with the location of the edge servers on which their corresponding AI agents are deployed in virtuality. To address this challenge, we design a cross-reality location privacy protection framework based on hybrid actions, including continuous location perturbation in reality and discrete privacy-aware AI agent migration in virtuality. In this framework, a new privacy metric, termed cross-reality location entropy, is proposed to effectively quantify the privacy levels of AVs. Based on this metric, we formulate an optimization problem to optimize the hybrid action, focusing on achieving a balance between location protection, service latency reduction, and quality of service maintenance. To solve the complex mixed-integer problem, we develop a novel LLM-enhanced Hybrid Diffusion Proximal Policy Optimization (LHDPPO) algorithm, which integrates LLM-driven informative reward design to enhance environment understanding with double Generative Diffusion Models-based policy exploration to handle high-dimensional action spaces, thereby enabling reliable determination of optimal hybrid actions. Extensive experiments on real-world datasets demonstrate that the proposed framework effectively mitigates cross-reality location privacy leakage for AVs while maintaining strong user immersion within 6G-enabled vehicular metaverse scenarios.
Domain Confusion with Self Ensembling for Unsupervised Adaptation
Oct 10, 2018
Data collection and annotation are time-consuming in machine learning, expecially for large scale problem. A common approach for this problem is to transfer knowledge from a related labeled domain to a target one. There are two popular ways to achieve this goal: adversarial learning and self training. In this article, we first analyze the training unstablity problem and the mistaken confusion issue in adversarial learning process. Then, inspired by domain confusion and self-ensembling methods, we propose a combined model to learn feature and class jointly invariant representation, namely Domain Confusion with Self Ensembling (DCSE). The experiments verified that our proposed approach can offer better performance than empirical art in a variety of unsupervised domain adaptation benchmarks.
Kernel Sparse Subspace Clustering on Symmetric Positive Definite Manifolds
Jan 04, 2016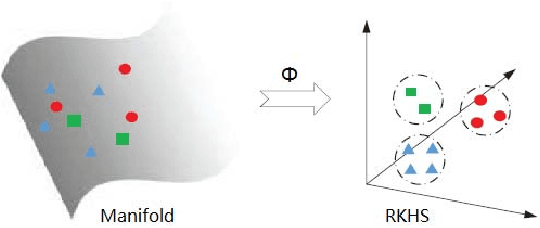
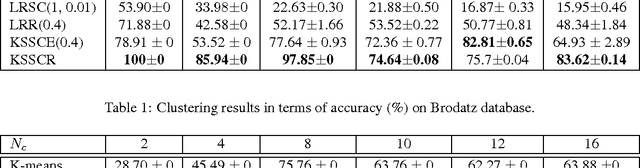
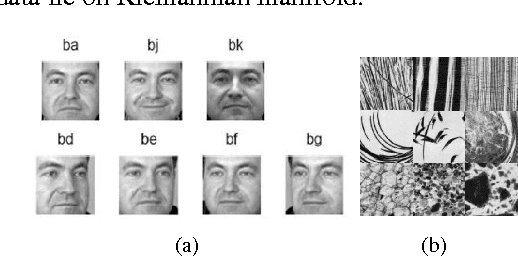
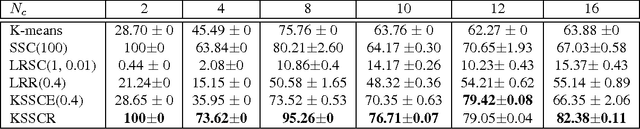
Sparse subspace clustering (SSC), as one of the most successful subspace clustering methods, has achieved notable clustering accuracy in computer vision tasks. However, SSC applies only to vector data in Euclidean space. As such, there is still no satisfactory approach to solve subspace clustering by ${\it self-expressive}$ principle for symmetric positive definite (SPD) matrices which is very useful in computer vision. In this paper, by embedding the SPD matrices into a Reproducing Kernel Hilbert Space (RKHS), a kernel subspace clustering method is constructed on the SPD manifold through an appropriate Log-Euclidean kernel, termed as kernel sparse subspace clustering on the SPD Riemannian manifold (KSSCR). By exploiting the intrinsic Riemannian geometry within data, KSSCR can effectively characterize the geodesic distance between SPD matrices to uncover the underlying subspace structure. Experimental results on two famous database demonstrate that the proposed method achieves better clustering results than the state-of-the-art approaches.