 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZooming without Zooming: Region-to-Image Distillation for Fine-Grained Multimodal Perception
Feb 16, 2026Multimodal Large Language Models (MLLMs) excel at broad visual understanding but still struggle with fine-grained perception, where decisive evidence is small and easily overwhelmed by global context. Recent "Thinking-with-Images" methods alleviate this by iteratively zooming in and out regions of interest during inference, but incur high latency due to repeated tool calls and visual re-encoding. To address this, we propose Region-to-Image Distillation, which transforms zooming from an inference-time tool into a training-time primitive, thereby internalizing the benefits of agentic zooming into a single forward pass of an MLLM. In particular, we first zoom in to micro-cropped regions to let strong teacher models generate high-quality VQA data, and then distill this region-grounded supervision back to the full image. After training on such data, the smaller student model improves "single-glance" fine-grained perception without tool use. To rigorously evaluate this capability, we further present ZoomBench, a hybrid-annotated benchmark of 845 VQA data spanning six fine-grained perceptual dimensions, together with a dual-view protocol that quantifies the global--regional "zooming gap". Experiments show that our models achieve leading performance across multiple fine-grained perception benchmarks, and also improve general multimodal cognition on benchmarks such as visual reasoning and GUI agents. We further discuss when "Thinking-with-Images" is necessary versus when its gains can be distilled into a single forward pass. Our code is available at https://github.com/inclusionAI/Zooming-without-Zooming.
AgentEHR: Advancing Autonomous Clinical Decision-Making via Retrospective Summarization
Jan 20, 2026Large Language Models have demonstrated profound utility in the medical domain. However, their application to autonomous Electronic Health Records~(EHRs) navigation remains constrained by a reliance on curated inputs and simplified retrieval tasks. To bridge the gap between idealized experimental settings and realistic clinical environments, we present AgentEHR. This benchmark challenges agents to execute complex decision-making tasks, such as diagnosis and treatment planning, requiring long-range interactive reasoning directly within raw and high-noise databases. In tackling these tasks, we identify that existing summarization methods inevitably suffer from critical information loss and fractured reasoning continuity. To address this, we propose RetroSum, a novel framework that unifies a retrospective summarization mechanism with an evolving experience strategy. By dynamically re-evaluating interaction history, the retrospective mechanism prevents long-context information loss and ensures unbroken logical coherence. Additionally, the evolving strategy bridges the domain gap by retrieving accumulated experience from a memory bank. Extensive empirical evaluations demonstrate that RetroSum achieves performance gains of up to 29.16% over competitive baselines, while significantly decreasing total interaction errors by up to 92.3%.
From Trial to Deployment: A SEM Analysis of Traveler Adoptions to Fully Operational Autonomous Taxis
Dec 31, 2025Autonomous taxi services represent a transformative advancement in urban mobility, offering safety, efficiency, and round-the-clock operations. While existing literature has explored user acceptance of autonomous taxis through stated preference experiments and hypothetical scenarios, few studies have investigated actual user behavior based on operational AV services. This study addresses that gap by leveraging survey data from Wuhan, China, where Baidu's Apollo Robotaxi service operates at scale. We design a realistic survey incorporating actual service attributes and collect 336 valid responses from actual users. Using Structural Equation Modeling, we identify six latent psychological constructs, namely Trust \& Policy Support, Cost Sensitivity, Performance, Behavioral Intention, Lifestyle, and Education. Their influences on adoption behavior, measured by the selection frequency of autonomous taxis in ten scenarios, are examined and interpreted. Results show that Cost Sensitivity and Behavioral Intention are the strongest positive predictors of adoption, while other latent constructs play more nuanced roles. The model demonstrates strong goodness-of-fit across multiple indices. Our findings offer empirical evidence to support policymaking, fare design, and public outreach strategies for scaling autonomous taxis deployments in real-world urban settings.
Exploring Key Factors for Long-Term Vessel Incident Risk Prediction
May 30, 2024



Factor analysis acts a pivotal role in enhancing maritime safety. Most previous studies conduct factor analysis within the framework of incident-related label prediction, where the developed models can be categorized into short-term and long-term prediction models. The long-term models offer a more strategic approach, enabling more proactive risk management, compared to the short-term ones. Nevertheless, few studies have devoted to rigorously identifying the key factors for the long-term prediction and undertaking comprehensive factor analysis. Hence, this study aims to delve into the key factors for predicting the incident risk levels in the subsequent year given a specific datestamp. The majority of candidate factors potentially contributing to the incident risk are collected from vessels' historical safety performance data spanning up to five years. An improved embedded feature selection, which integrates Random Forest classifier with a feature filtering process is proposed to identify key risk-contributing factors from the candidate pool. The results demonstrate superior performance of the proposed method in incident prediction and factor interpretability. Comprehensive analysis is conducted upon the key factors, which could help maritime stakeholders formulate management strategies for incident prevenion.
MA-Unet: An improved version of Unet based on multi-scale and attention mechanism for medical image segmentation
Dec 20, 2020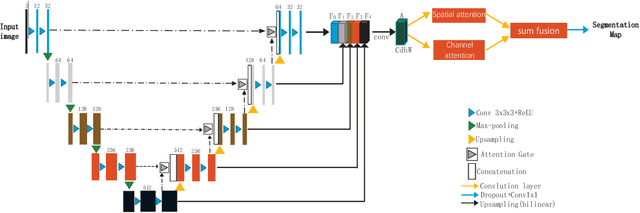
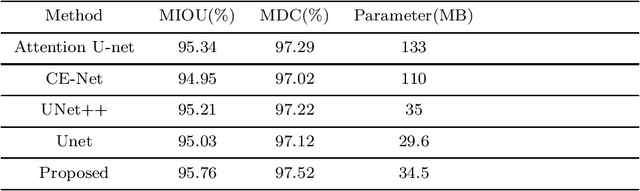
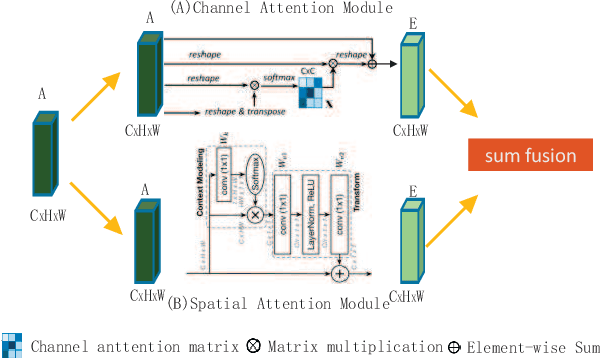
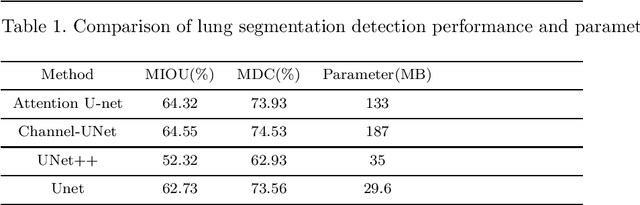
Although convolutional neural networks (CNNs) are promoting the development of medical image semantic segmentation, the standard model still has some shortcomings. First, the feature mapping from the encoder and decoder sub-networks in the skip connection operation has a large semantic difference. Second, the remote feature dependence is not effectively modeled. Third, the global context information of different scales is ignored. In this paper, we try to eliminate semantic ambiguity in skip connection operations by adding attention gates (AGs), and use attention mechanisms to combine local features with their corresponding global dependencies, explicitly model the dependencies between channels and use multi-scale predictive fusion to utilize global information at different scales. Compared with other state-of-the-art segmentation networks, our model obtains better segmentation performance while introducing fewer parameters.