 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRESAR-BEV: An Explainable Progressive Residual Autoregressive Approach for Camera-Radar Fusion in BEV Segmentation
May 10, 2025



Bird's-Eye-View (BEV) semantic segmentation provides comprehensive environmental perception for autonomous driving but suffers multi-modal misalignment and sensor noise. We propose RESAR-BEV, a progressive refinement framework that advances beyond single-step end-to-end approaches: (1) progressive refinement through residual autoregressive learning that decomposes BEV segmentation into interpretable coarse-to-fine stages via our Drive-Transformer and Modifier-Transformer residual prediction cascaded architecture, (2) robust BEV representation combining ground-proximity voxels with adaptive height offsets and dual-path voxel feature encoding (max+attention pooling) for efficient feature extraction, and (3) decoupled supervision with offline Ground Truth decomposition and online joint optimization to prevent overfitting while ensuring structural coherence. Experiments on nuScenes demonstrate RESAR-BEV achieves state-of-the-art performance with 54.0% mIoU across 7 essential driving-scene categories while maintaining real-time capability at 14.6 FPS. The framework exhibits robustness in challenging scenarios of long-range perception and adverse weather conditions.
MSA-GCN:Multiscale Adaptive Graph Convolution Network for Gait Emotion Recognition
Sep 19, 2022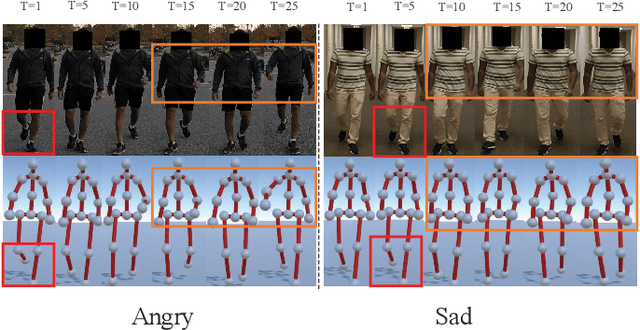
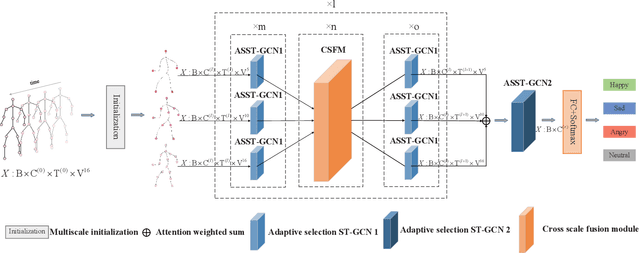
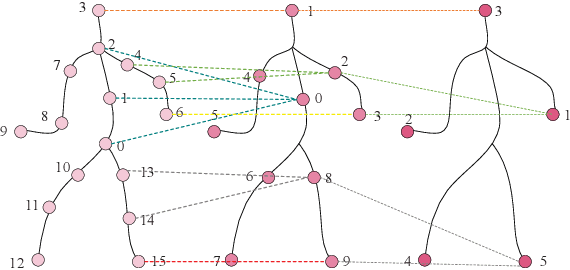
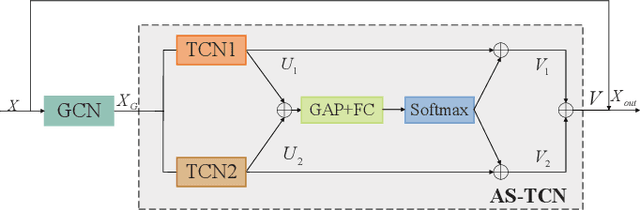
Gait emotion recognition plays a crucial role in the intelligent system. Most of the existing methods recognize emotions by focusing on local actions over time. However, they ignore that the effective distances of different emotions in the time domain are different, and the local actions during walking are quite similar. Thus, emotions should be represented by global states instead of indirect local actions. To address these issues, a novel Multi Scale Adaptive Graph Convolution Network (MSA-GCN) is presented in this work through constructing dynamic temporal receptive fields and designing multiscale information aggregation to recognize emotions. In our model, a adaptive selective spatial-temporal graph convolution is designed to select the convolution kernel dynamically to obtain the soft spatio-temporal features of different emotions. Moreover, a Cross-Scale mapping Fusion Mechanism (CSFM) is designed to construct an adaptive adjacency matrix to enhance information interaction and reduce redundancy. Compared with previous state-of-the-art methods, the proposed method achieves the best performance on two public datasets, improving the mAP by 2\%. We also conduct extensive ablations studies to show the effectiveness of different components in our methods.