 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKimera-Multi: a System for Distributed Multi-Robot Metric-Semantic Simultaneous Localization and Mapping
Nov 08, 2020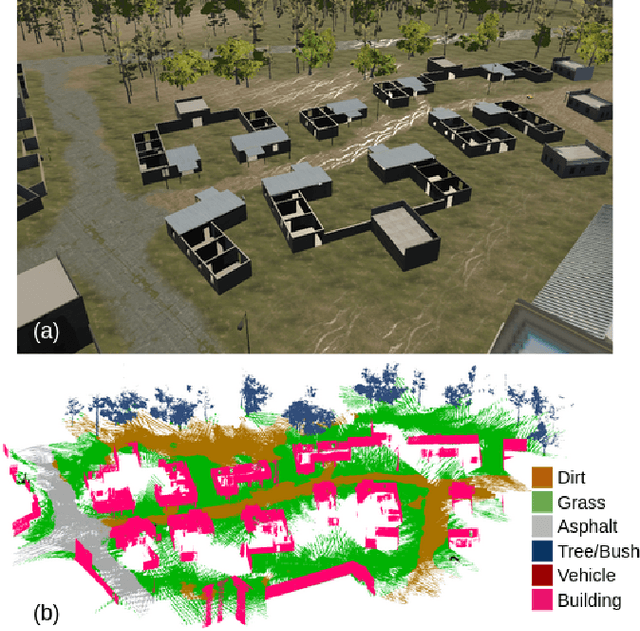
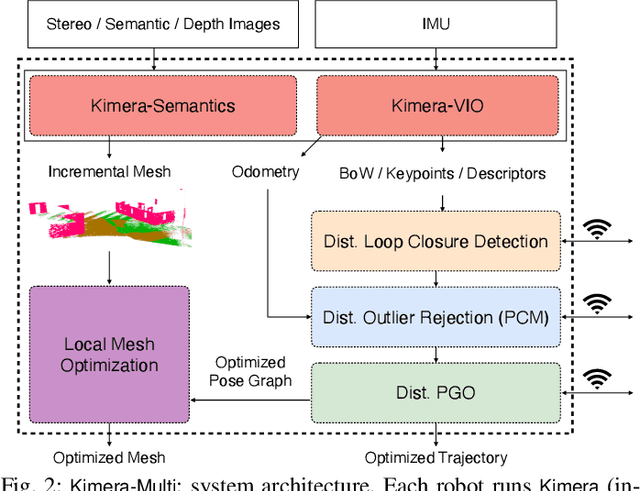
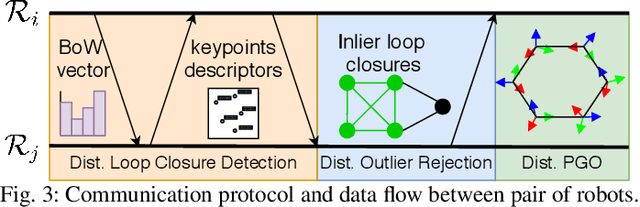
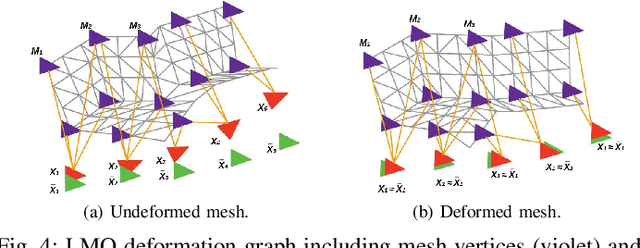
We present the first fully distributed multi-robot system for dense metric-semantic Simultaneous Localization and Mapping (SLAM). Our system, dubbed Kimera-Multi, is implemented by a team of robots equipped with visual-inertial sensors, and builds a 3D mesh model of the environment in real-time, where each face of the mesh is annotated with a semantic label (e.g., building, road, objects). In Kimera-Multi, each robot builds a local trajectory estimate and a local mesh using Kimera. Then, when two robots are within communication range, they initiate a distributed place recognition and robust pose graph optimization protocol with a novel incremental maximum clique outlier rejection; the protocol allows the robots to improve their local trajectory estimates by leveraging inter-robot loop closures. Finally, each robot uses its improved trajectory estimate to correct the local mesh using mesh deformation techniques. We demonstrate Kimera-Multi in photo-realistic simulations and real data. Kimera-Multi (i) is able to build accurate 3D metric-semantic meshes, (ii) is robust to incorrect loop closures while requiring less computation than state-of-the-art distributed SLAM back-ends, and (iii) is efficient, both in terms of computation at each robot as well as communication bandwidth.
Asynchronous and Parallel Distributed Pose Graph Optimization
Mar 06, 2020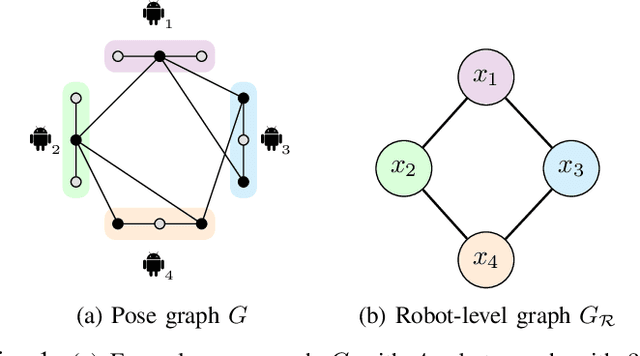
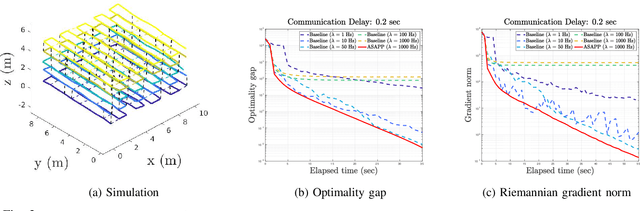
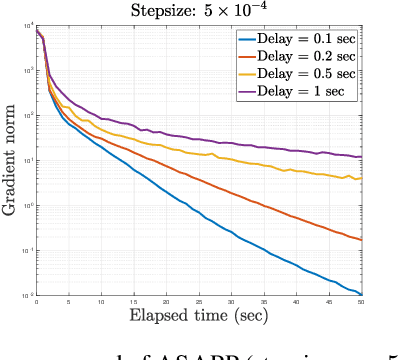
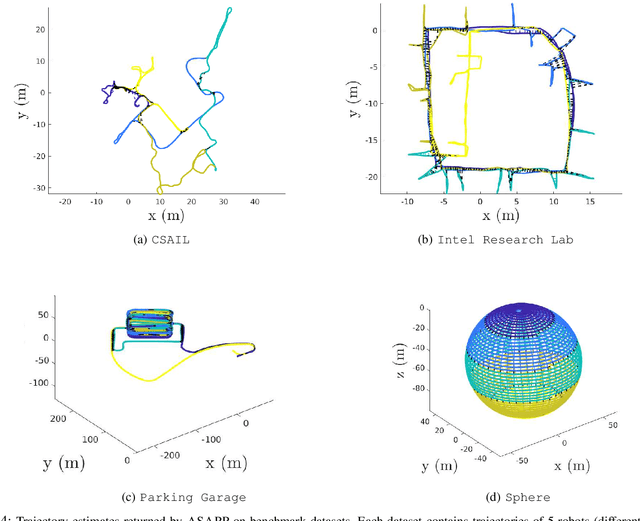
We present Asynchronous Stochastic Parallel Pose Graph Optimization (ASAPP), the first asynchronous algorithm for distributed pose graph optimization (PGO) in multi-robot simultaneous localization and mapping. By enabling robots to optimize their local trajectory estimates without synchronization, ASAPP offers resiliency against communication delays and alleviates the need to wait for stragglers in the network. Furthermore, the same algorithm can be used to solve the so-called rank-restricted semidefinite relaxations of PGO, a crucial class of non-convex Riemannian optimization problems at the center of recent PGO solvers with global optimality guarantees. Under bounded delay, we establish the global first-order convergence of ASAPP using a sufficiently small stepsize. The derived stepsize depends on the worst-case delay and inherent problem sparsity, and furthermore matches known result for synchronous algorithms when delay is zero. Numerical evaluations on both simulated and real-world SLAM datasets demonstrate the speedup achieved with ASAPP and show the algorithm's resilience against a wide range of communication delays in practice.
Block-Coordinate Descent on the Riemannian Staircase for Certifiably Correct Distributed Rotation and Pose Synchronization
Dec 21, 2019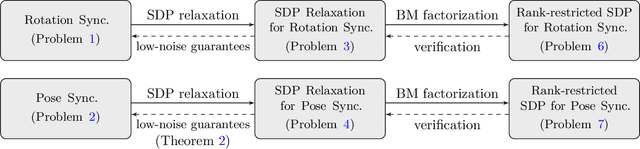
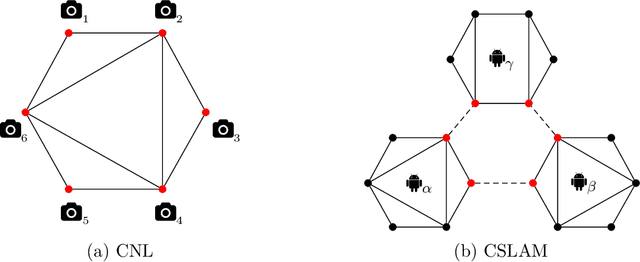
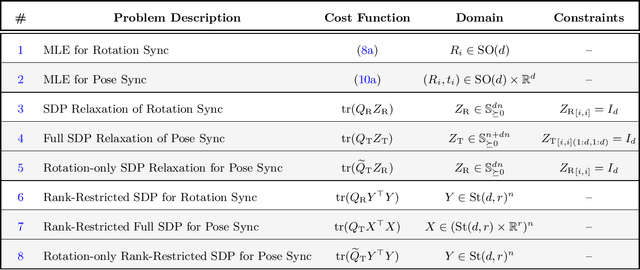
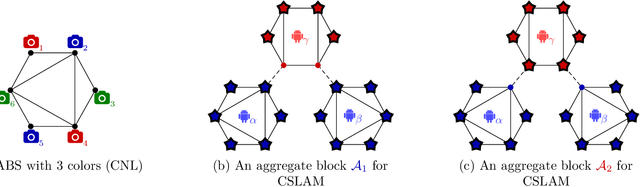
This paper presents the first certifiably correct solver for distributed rotation and pose synchronization, the backbone of modern collaborative simultaneous localization and mapping (CSLAM) and camera network localization (CNL) systems. By pursuing a sparse semidefinite relaxation, our approach provides formal performance guarantees that match the state of the art in the centralized setting. In particular, we prove that under "low" noise, the solution to the semidefinite relaxation is guaranteed to provide a globally optimal solution to the original non-convex problem. To solve the resulting large-scale semidefinite programs, we adopt the state-of-the-art Riemannian Staircase framework and develop Riemannian block-coordinate descent (RBCD) as the core distributed local search algorithm. RBCD is well-suited to distributed synchronization problems as it only requires local communication, provides privacy protection, and is easily parallelizable. Furthermore, we prove that RBCD converges to first-order critical points for general Riemannian optimization problems over product of matrix submanifolds, with a global sublinear convergence rate. Extensive evaluations on real and synthetic datasets demonstrate that the proposed solver correctly recovers globally optimal solutions under low-to-moderate noise, and outperforms alternative distributed techniques in terms of solution precision and convergence speed.
Search and Rescue under the Forest Canopy using Multiple UAVs
Aug 28, 2019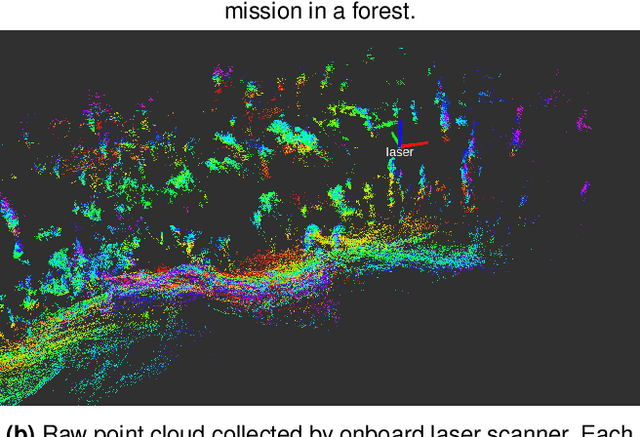
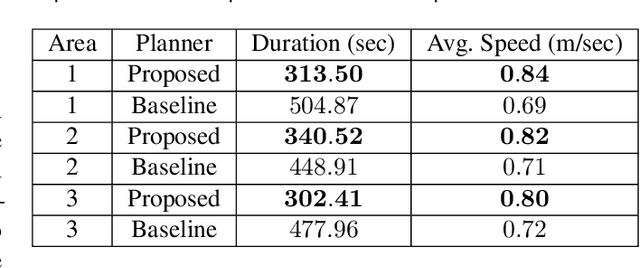
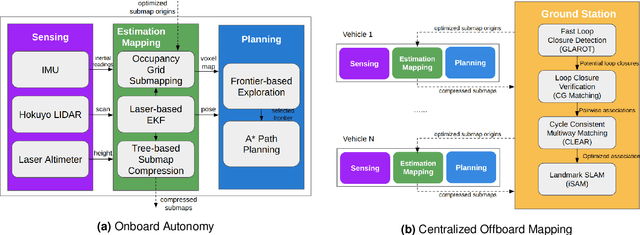
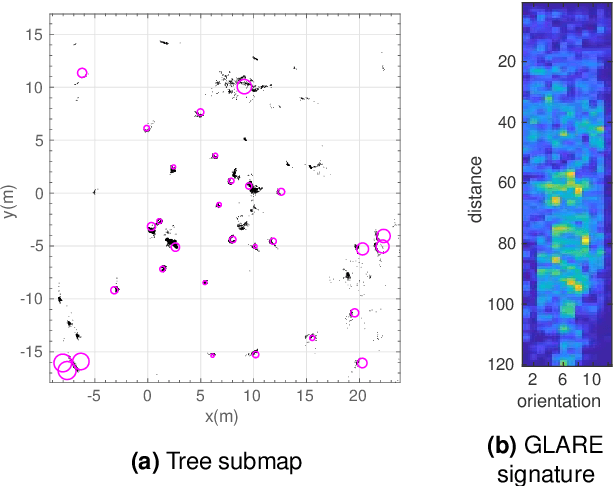
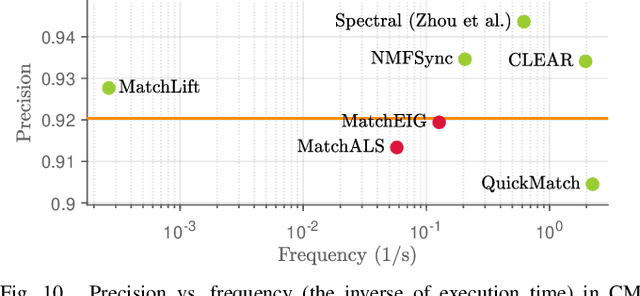
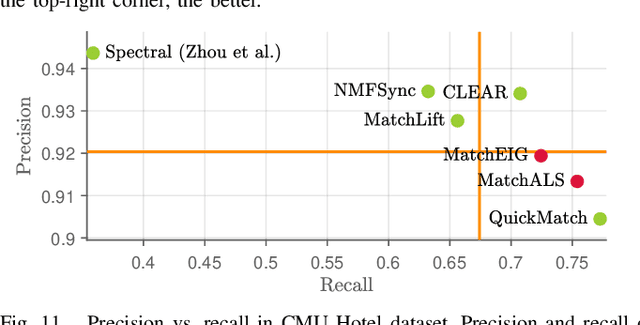
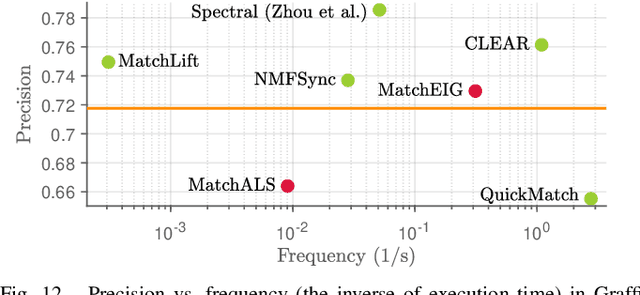
We present a multi-robot system for GPS-denied search and rescue under the forest canopy. Forests are particularly challenging environments for collaborative exploration and mapping, in large part due to the existence of severe perceptual aliasing which hinders reliable loop closure detection for mutual localization and map fusion. Our proposed system features unmanned aerial vehicles (UAVs) that perform onboard sensing, estimation, and planning. When communication is available, each UAV transmits compressed tree-based submaps to a central ground station for collaborative simultaneous localization and mapping (CSLAM). To overcome high measurement noise and perceptual aliasing, we use the local configuration of a group of trees as a distinctive feature for robust loop closure detection. Furthermore, we propose a novel procedure based on cycle consistent multiway matching to recover from incorrect pairwise data associations. The returned global data association is guaranteed to be cycle consistent, and is shown to improve both precision and recall compared to the input pairwise associations. The proposed multi-UAV system is validated both in simulation and during real-world collaborative exploration missions at NASA Langley Research Center.
A Resource-Aware Approach to Collaborative Loop Closure Detection with Provable Performance Guarantees
Jul 10, 2019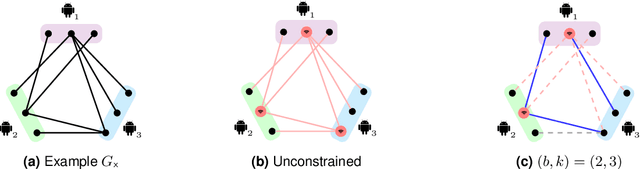

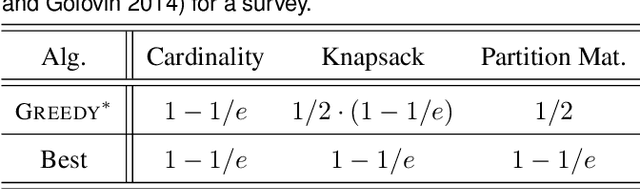
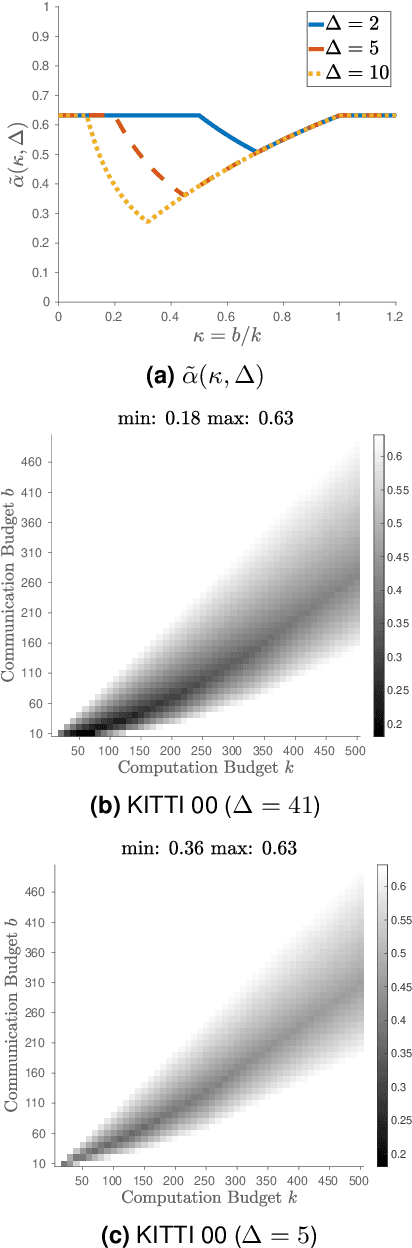
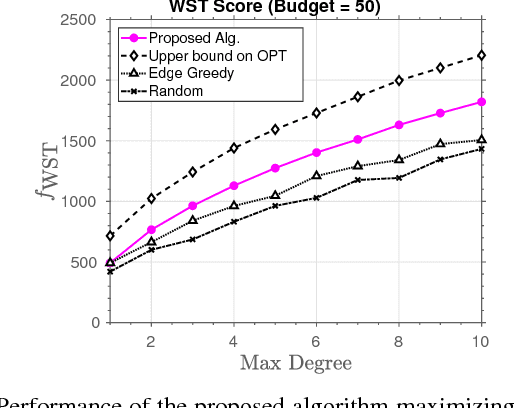
This paper presents resource-aware algorithms for distributed inter-robot loop closure detection for applications such as collaborative simultaneous localization and mapping (CSLAM) and distributed image retrieval. In real-world scenarios, this process is resource-intensive as it involves exchanging many observations and geometrically verifying a large number of potential matches. This poses severe challenges for small-size and low-cost robots with various operational and resource constraints that limit, e.g., energy consumption, communication bandwidth, and computation capacity. This paper proposes a framework in which robots first exchange compact queries to identify a set of potential loop closures. We then seek to select a subset of potential inter-robot loop closures for geometric verification that maximizes a monotone submodular performance metric without exceeding budgets on computation (number of geometric verifications) and communication (amount of exchanged data for geometric verification). We demonstrate that this problem is in general NP-hard, and present efficient approximation algorithms with provable performance guarantees. The proposed framework is extensively evaluated on real and synthetic datasets. A natural convex relaxation scheme is also presented to certify the near-optimal performance of the proposed framework in practice.
Block-Coordinate Minimization for Large SDPs with Block-Diagonal Constraints
Mar 09, 2019The so-called Burer-Monteiro method is a well-studied technique for solving large-scale semidefinite programs (SDPs) via low-rank factorization. The main idea is to solve rank-restricted, albeit non-convex, surrogates instead of the SDP. Recent works have shown that, in an important class of SDPs with elegant geometric structure, one can find globally optimal solutions to the SDP by finding rank-deficient second-order critical points of an unconstrained Riemannian optimization problem. Hence, in such problems, the Burer-Monteiro approach can provide a scalable and reliable alternative to interior-point methods that scale poorly. Among various Riemannian optimization methods proposed, block-coordinate minimization (BCM) is of particular interest due to its simplicity. Erdogdu et al. in their recent work proposed BCM for problems over the Cartesian product of unit spheres and provided global convergence rate estimates for the algorithm. This report extends the BCM algorithm and the global convergence rate analysis of Erdogdu et al. from problems over the Cartesian product of unit spheres to the Cartesian product of Stiefel manifolds. The latter more general setting has important applications such as synchronization over the special orthogonal (SO) and special Euclidean (SE) groups.
CLEAR: A Consistent Lifting, Embedding, and Alignment Rectification Algorithm for Multi-Agent Data Association
Feb 06, 2019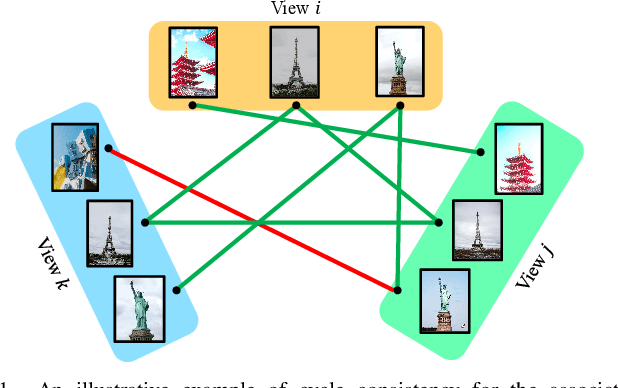
A fundamental challenge in many robotics applications is to correctly synchronize and fuse observations across a team of sensors or agents. Instead of solely relying on pairwise matches among observations, multi-way matching methods leverage the notion of cycle consistency to (i) provide a natural correction mechanism for removing noise and outliers from pairwise matches; (ii) construct an efficient and low-rank representation of the data via merging the redundant observations. To solve this computationally challenging problem, state-of-the-art techniques resort to relaxation and rounding techniques that can potentially result in a solution that violates the cycle consistency principle. Hence, losing the aforementioned benefits. In this work, we present the CLEAR algorithm to address this issue by generating solutions that are, by construction, cycle consistent. Through a novel spectral graph clustering approach, CLEAR fuses the techniques in the multi-way matching and the spectral clustering literature and provides consistent solutions, even in challenging high-noise regimes. Our resulting general framework can provide significant improvement in the accuracy and efficiency of existing distributed multi-agent learning, collaborative SLAM, and multiobject tracking pipelines, which traditionally use pairwise (but potentially inconsistent) correspondences.
Resource-Aware Algorithms for Distributed Loop Closure Detection with Provable Performance Guarantees
Jan 17, 2019

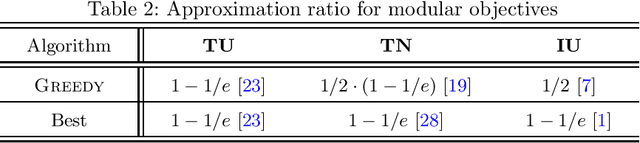
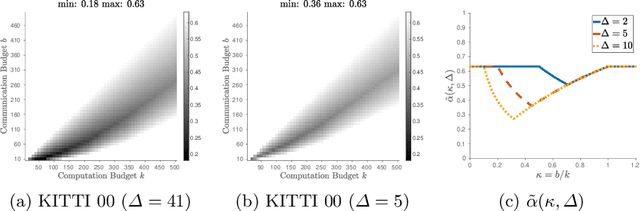
Inter-robot loop closure detection, e.g., for collaborative simultaneous localization and mapping (CSLAM), is a fundamental capability for many multirobot applications in GPS-denied regimes. In real-world scenarios, this is a resource-intensive process that involves exchanging observations and verifying potential matches. This poses severe challenges especially for small-size and low-cost robots with various operational and resource constraints that limit, e.g., energy consumption, communication bandwidth, and computation capacity. This paper presents resource-aware algorithms for distributed inter-robot loop closure detection. In particular, we seek to select a subset of potential inter-robot loop closures that maximizes a monotone submodular performance metric without exceeding computation and communication budgets. We demonstrate that this problem is in general NP-hard, and present efficient approximation algorithms with provable performance guarantees. A convex relaxation scheme is used to certify near-optimal performance of the proposed framework in real and synthetic SLAM benchmarks.
Near-Optimal Budgeted Data Exchange for Distributed Loop Closure Detection
Jun 01, 2018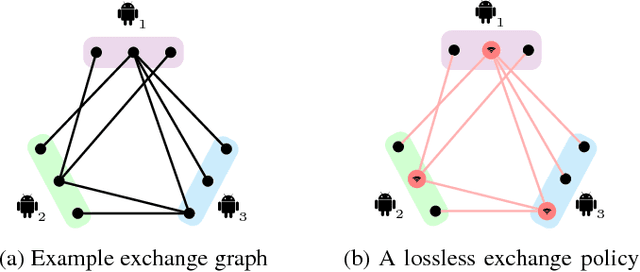
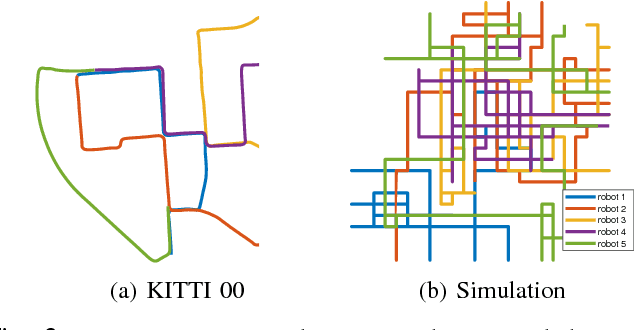
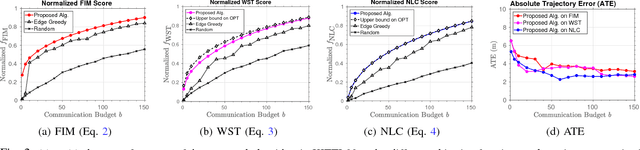
Inter-robot loop closure detection is a core problem in collaborative SLAM (CSLAM). Establishing inter-robot loop closures is a resource-demanding process, during which robots must consume a substantial amount of mission-critical resources (e.g., battery and bandwidth) to exchange sensory data. However, even with the most resource-efficient techniques, the resources available onboard may be insufficient for verifying every potential loop closure. This work addresses this critical challenge by proposing a resource-adaptive framework for distributed loop closure detection. We seek to maximize task-oriented objectives subject to a budget constraint on total data transmission. This problem is in general NP-hard. We approach this problem from different perspectives and leverage existing results on monotone submodular maximization to provide efficient approximation algorithms with performance guarantees. The proposed approach is extensively evaluated using the KITTI odometry benchmark dataset and synthetic Manhattan-like datasets.