 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Resource-Aware Approach to Collaborative Loop Closure Detection with Provable Performance Guarantees
Paper and Code
Jul 10, 2019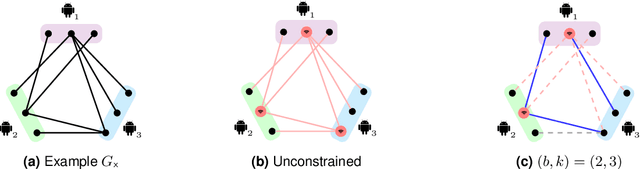

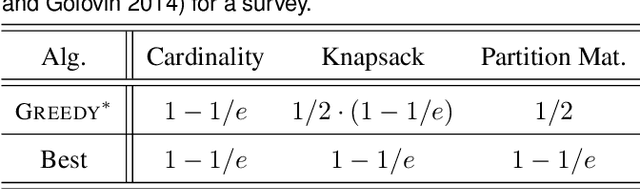
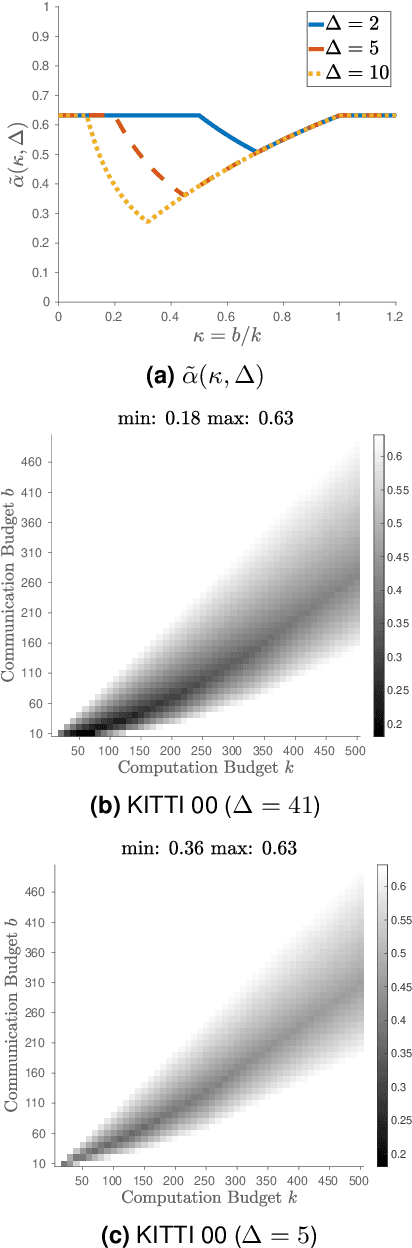
This paper presents resource-aware algorithms for distributed inter-robot loop closure detection for applications such as collaborative simultaneous localization and mapping (CSLAM) and distributed image retrieval. In real-world scenarios, this process is resource-intensive as it involves exchanging many observations and geometrically verifying a large number of potential matches. This poses severe challenges for small-size and low-cost robots with various operational and resource constraints that limit, e.g., energy consumption, communication bandwidth, and computation capacity. This paper proposes a framework in which robots first exchange compact queries to identify a set of potential loop closures. We then seek to select a subset of potential inter-robot loop closures for geometric verification that maximizes a monotone submodular performance metric without exceeding budgets on computation (number of geometric verifications) and communication (amount of exchanged data for geometric verification). We demonstrate that this problem is in general NP-hard, and present efficient approximation algorithms with provable performance guarantees. The proposed framework is extensively evaluated on real and synthetic datasets. A natural convex relaxation scheme is also presented to certify the near-optimal performance of the proposed framework in practice.