 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTranslating Flow to Policy via Hindsight Online Imitation
Dec 22, 2025Recent advances in hierarchical robot systems leverage a high-level planner to propose task plans and a low-level policy to generate robot actions. This design allows training the planner on action-free or even non-robot data sources (e.g., videos), providing transferable high-level guidance. Nevertheless, grounding these high-level plans into executable actions remains challenging, especially with the limited availability of high-quality robot data. To this end, we propose to improve the low-level policy through online interactions. Specifically, our approach collects online rollouts, retrospectively annotates the corresponding high-level goals from achieved outcomes, and aggregates these hindsight-relabeled experiences to update a goal-conditioned imitation policy. Our method, Hindsight Flow-conditioned Online Imitation (HinFlow), instantiates this idea with 2D point flows as the high-level planner. Across diverse manipulation tasks in both simulation and physical world, our method achieves more than $2\times$ performance improvement over the base policy, significantly outperforming the existing methods. Moreover, our framework enables policy acquisition from planners trained on cross-embodiment video data, demonstrating its potential for scalable and transferable robot learning.
Smart obervation method with wide field small aperture telescopes for real time transient detection
Nov 20, 2020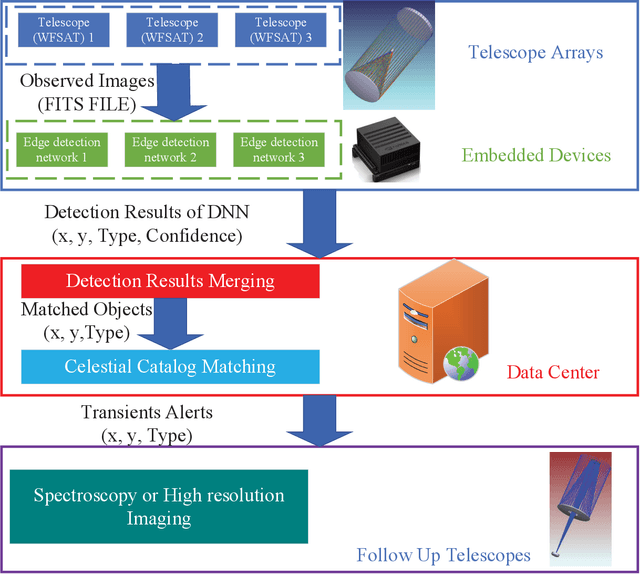
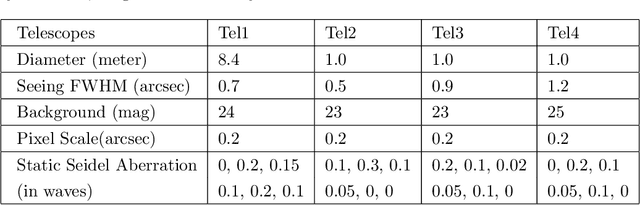
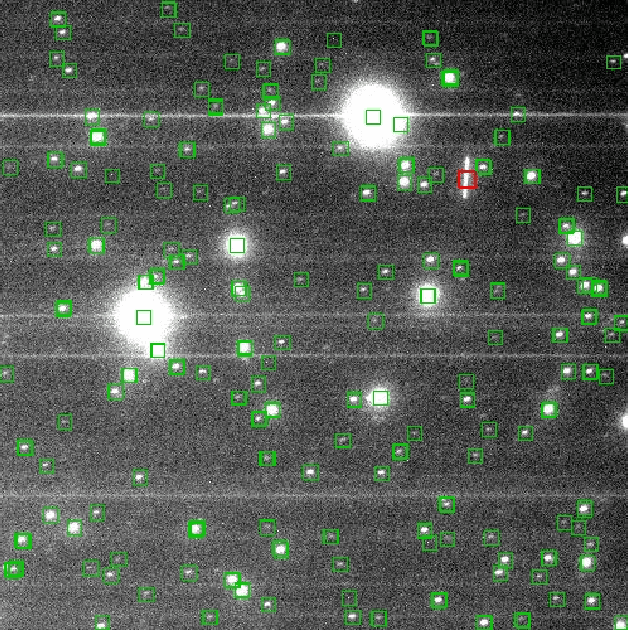
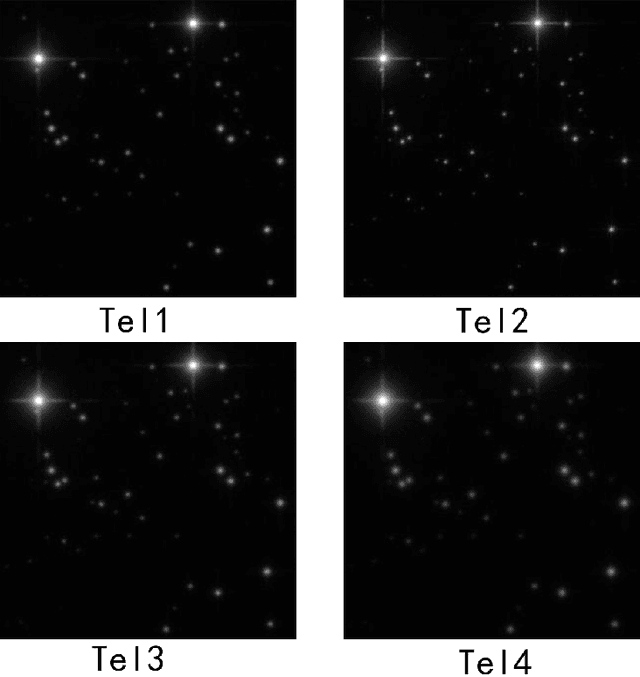
Wide field small aperture telescopes (WFSATs) are commonly used for fast sky survey. Telescope arrays composed by several WFSATs are capable to scan sky several times per night. Huge amount of data would be obtained by them and these data need to be processed immediately. In this paper, we propose ARGUS (Astronomical taRGets detection framework for Unified telescopes) for real-time transit detection. The ARGUS uses a deep learning based astronomical detection algorithm implemented in embedded devices in each WFSATs to detect astronomical targets. The position and probability of a detection being an astronomical targets will be sent to a trained ensemble learning algorithm to output information of celestial sources. After matching these sources with star catalog, ARGUS will directly output type and positions of transient candidates. We use simulated data to test the performance of ARGUS and find that ARGUS can increase the performance of WFSATs in transient detection tasks robustly.