 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolve Cost-aware Acquisition Functions Using Large Language Models
Apr 25, 2024Many real-world optimization scenarios involve expensive evaluation with unknown and heterogeneous costs. Cost-aware Bayesian optimization stands out as a prominent solution in addressing these challenges. To approach the global optimum within a limited budget in a cost-efficient manner, the design of cost-aware acquisition functions (AFs) becomes a crucial step. However, traditional manual design paradigm typically requires extensive domain knowledge and involves a labor-intensive trial-and-error process. This paper introduces EvolCAF, a novel framework that integrates large language models (LLMs) with evolutionary computation (EC) to automatically design cost-aware AFs. Leveraging the crossover and mutation in the algorithm space, EvolCAF offers a novel design paradigm, significantly reduces the reliance on domain expertise and model training. The designed cost-aware AF maximizes the utilization of available information from historical data, surrogate models and budget details. It introduces novel ideas not previously explored in the existing literature on acquisition function design, allowing for clear interpretations to provide insights into its behavior and decision-making process. In comparison to the well-known EIpu and EI-cool methods designed by human experts, our approach showcases remarkable efficiency and generalization across various tasks, including 12 synthetic problems and 3 real-world hyperparameter tuning test sets.
Residual Channel Attention Network for Brain Glioma Segmentation
May 22, 2022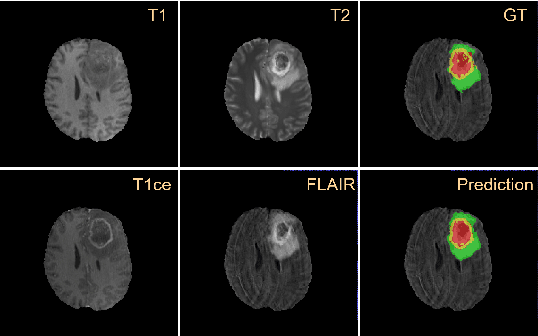
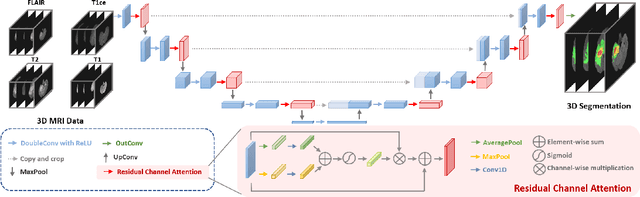
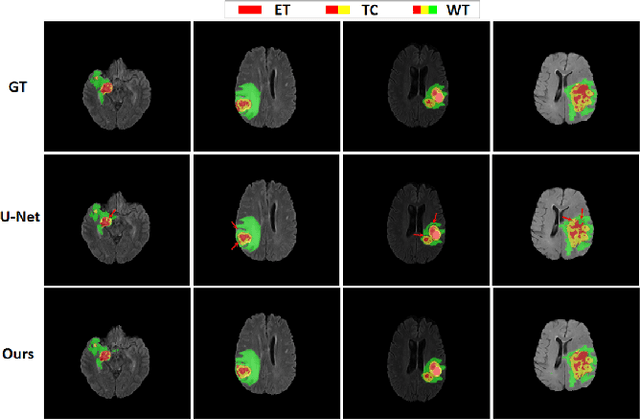

A glioma is a malignant brain tumor that seriously affects cognitive functions and lowers patients' life quality. Segmentation of brain glioma is challenging because of interclass ambiguities in tumor regions. Recently, deep learning approaches have achieved outstanding performance in the automatic segmentation of brain glioma. However, existing algorithms fail to exploit channel-wise feature interdependence to select semantic attributes for glioma segmentation. In this study, we implement a novel deep neural network that integrates residual channel attention modules to calibrate intermediate features for glioma segmentation. The proposed channel attention mechanism adaptively weights feature channel-wise to optimize the latent representation of gliomas. We evaluate our method on the established dataset BraTS2017. Experimental results indicate the superiority of our method.
An Autonomous Probing System for Collecting Measurements at Depth from Small Surface Vehicles
Oct 27, 2021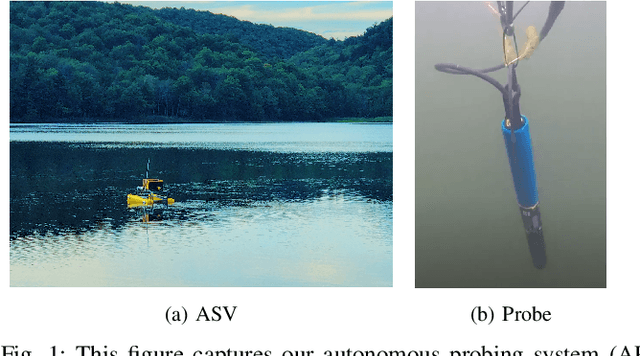
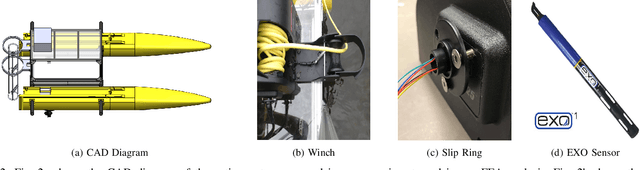
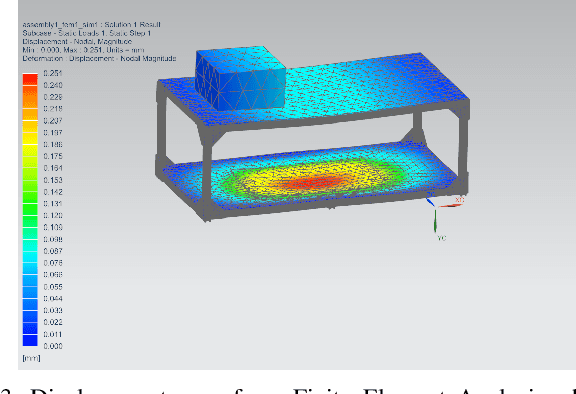
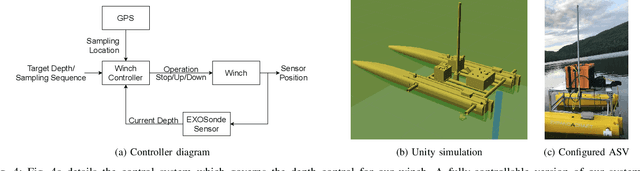
This paper presents the portable autonomous probing system (APS), a low-cost robotic design for collecting water quality measurements at targeted depths from an autonomous surface vehicle (ASV). This system fills an important but often overlooked niche in marine sampling by enabling mobile sensor observations throughout the near-surface water column without the need for advanced underwater equipment. We present a probe delivery mechanism built with commercially available components and describe the corresponding open-source simulator and winch controller. Finally, we demonstrate the system in a field deployment and discuss design trade-offs and areas for future improvement. Project details are available on https://johannah.github.io/publication/sample-at-depth our website