 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCottonSim: Development of an autonomous visual-guided robotic cotton-picking system in the Gazebo
May 08, 2025



In this study, an autonomous visual-guided robotic cotton-picking system, built on a Clearpath's Husky robot platform and the Cotton-Eye perception system, was developed in the Gazebo robotic simulator. Furthermore, a virtual cotton farm was designed and developed as a Robot Operating System (ROS 1) package to deploy the robotic cotton picker in the Gazebo environment for simulating autonomous field navigation. The navigation was assisted by the map coordinates and an RGB-depth camera, while the ROS navigation algorithm utilized a trained YOLOv8n-seg model for instance segmentation. The model achieved a desired mean Average Precision (mAP) of 85.2%, a recall of 88.9%, and a precision of 93.0% for scene segmentation. The developed ROS navigation packages enabled our robotic cotton-picking system to autonomously navigate through the cotton field using map-based and GPS-based approaches, visually aided by a deep learning-based perception system. The GPS-based navigation approach achieved a 100% completion rate (CR) with a threshold of 5 x 10^-6 degrees, while the map-based navigation approach attained a 96.7% CR with a threshold of 0.25 m. This study establishes a fundamental baseline of simulation for future agricultural robotics and autonomous vehicles in cotton farming and beyond. CottonSim code and data are released to the research community via GitHub: https://github.com/imtheva/CottonSim
VLLFL: A Vision-Language Model Based Lightweight Federated Learning Framework for Smart Agriculture
Apr 17, 2025



In modern smart agriculture, object detection plays a crucial role by enabling automation, precision farming, and monitoring of resources. From identifying crop health and pest infestations to optimizing harvesting processes, accurate object detection enhances both productivity and sustainability. However, training object detection models often requires large-scale data collection and raises privacy concerns, particularly when sensitive agricultural data is distributed across farms. To address these challenges, we propose VLLFL, a vision-language model-based lightweight federated learning framework (VLLFL). It harnesses the generalization and context-aware detection capabilities of the vision-language model (VLM) and leverages the privacy-preserving nature of federated learning. By training a compact prompt generator to boost the performance of the VLM deployed across different farms, VLLFL preserves privacy while reducing communication overhead. Experimental results demonstrate that VLLFL achieves 14.53% improvement in the performance of VLM while reducing 99.3% communication overhead. Spanning tasks from identifying a wide variety of fruits to detecting harmful animals in agriculture, the proposed framework offers an efficient, scalable, and privacy-preserving solution specifically tailored to agricultural applications.
Label-Efficient Learning in Agriculture: A Comprehensive Review
May 24, 2023



The past decade has witnessed many great successes of machine learning (ML) and deep learning (DL) applications in agricultural systems, including weed control, plant disease diagnosis, agricultural robotics, and precision livestock management. Despite tremendous progresses, one downside of such ML/DL models is that they generally rely on large-scale labeled datasets for training, and the performance of such models is strongly influenced by the size and quality of available labeled data samples. In addition, collecting, processing, and labeling such large-scale datasets is extremely costly and time-consuming, partially due to the rising cost in human labor. Therefore, developing label-efficient ML/DL methods for agricultural applications has received significant interests among researchers and practitioners. In fact, there are more than 50 papers on developing and applying deep-learning-based label-efficient techniques to address various agricultural problems since 2016, which motivates the authors to provide a timely and comprehensive review of recent label-efficient ML/DL methods in agricultural applications. To this end, we first develop a principled taxonomy to organize these methods according to the degree of supervision, including weak supervision (i.e., active learning and semi-/weakly- supervised learning), and no supervision (i.e., un-/self- supervised learning), supplemented by representative state-of-the-art label-efficient ML/DL methods. In addition, a systematic review of various agricultural applications exploiting these label-efficient algorithms, such as precision agriculture, plant phenotyping, and postharvest quality assessment, is presented. Finally, we discuss the current problems and challenges, as well as future research directions. A well-classified paper list can be accessed at https://github.com/DongChen06/Label-efficient-in-Agriculture.
Generative Adversarial Networks for Image Augmentation in Agriculture: A Systematic Review
Apr 12, 2022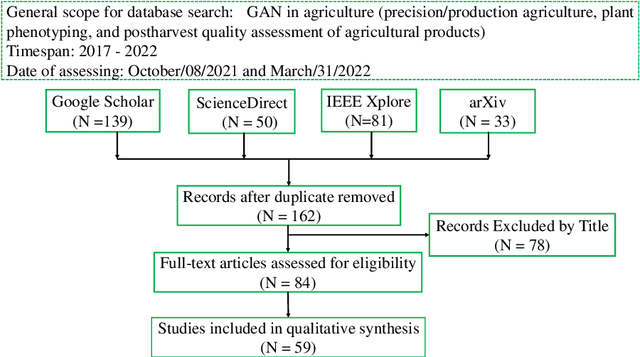
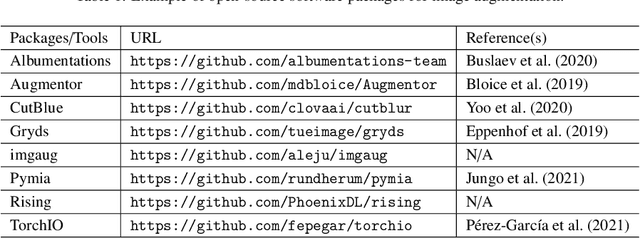
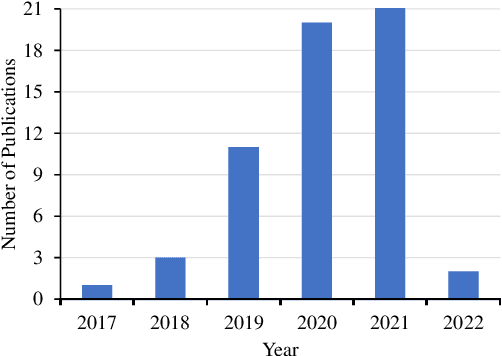
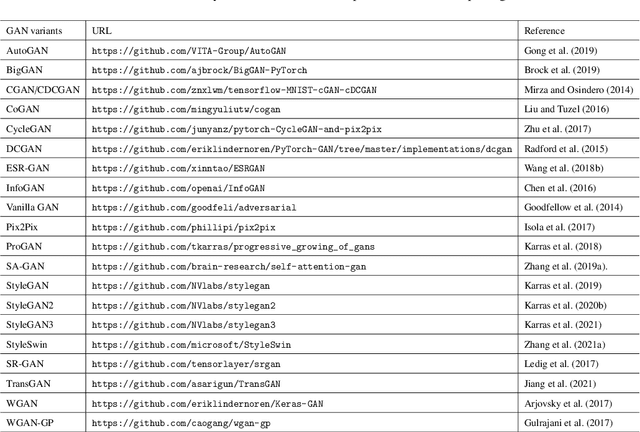
In agricultural image analysis, optimal model performance is keenly pursued for better fulfilling visual recognition tasks (e.g., image classification, segmentation, object detection and localization), in the presence of challenges with biological variability and unstructured environments. Large-scale, balanced and ground-truthed image datasets, however, are often difficult to obtain to fuel the development of advanced, high-performance models. As artificial intelligence through deep learning is impacting analysis and modeling of agricultural images, data augmentation plays a crucial role in boosting model performance while reducing manual efforts for data preparation, by algorithmically expanding training datasets. Beyond traditional data augmentation techniques, generative adversarial network (GAN) invented in 2014 in the computer vision community, provides a suite of novel approaches that can learn good data representations and generate highly realistic samples. Since 2017, there has been a growth of research into GANs for image augmentation or synthesis in agriculture for improved model performance. This paper presents an overview of the evolution of GAN architectures followed by a systematic review of their application to agriculture (https://github.com/Derekabc/GANs-Agriculture), involving various vision tasks for plant health, weeds, fruits, aquaculture, animal farming, plant phenotyping as well as postharvest detection of fruit defects. Challenges and opportunities of GANs are discussed for future research.