 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInsTraj: Instructing Diffusion Models with Travel Intentions to Generate Real-world Trajectories
Apr 05, 2026The generation of realistic and controllable GPS trajectories is a fundamental task for applications in urban planning, mobility simulation, and privacy-preserving data sharing. However, existing methods face a two-fold challenge: they lack the deep semantic understanding to interpret complex user travel intent, and struggle to handle complex constraints while maintaining the realistic diversity inherent in human behavior. To resolve this, we introduce InsTraj, a novel framework that instructs diffusion models to generate high-fidelity trajectories directly from natural language descriptions. Specifically, InsTraj first utilizes a powerful large language model to decipher unstructured travel intentions formed in natural language, thereby creating rich semantic blueprints and bridging the representation gap between intentions and trajectories. Subsequently, we proposed a multimodal trajectory diffusion transformer that can integrate semantic guidance to generate high-fidelity and instruction-faithful trajectories that adhere to fine-grained user intent. Comprehensive experiments on real-world datasets demonstrate that InsTraj significantly outperforms state-of-the-art methods in generating trajectories that are realistic, diverse, and semantically faithful to the input instructions.
Fast Parametric Model Checking through Model Fragmentation
Feb 02, 2021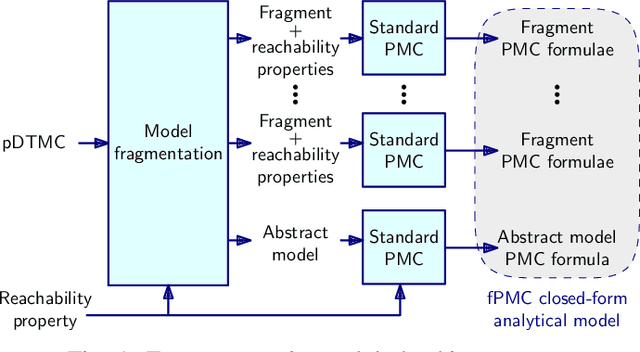
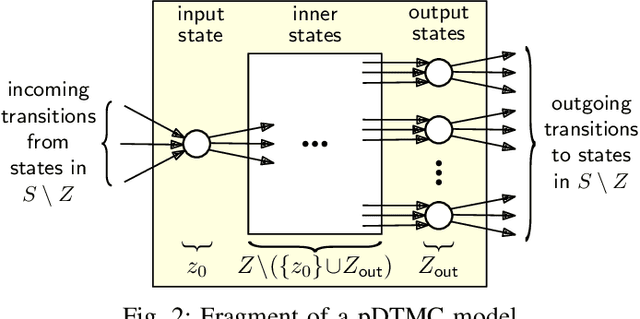
Parametric model checking (PMC) computes algebraic formulae that express key non-functional properties of a system (reliability, performance, etc.) as rational functions of the system and environment parameters. In software engineering, PMC formulae can be used during design, e.g., to analyse the sensitivity of different system architectures to parametric variability, or to find optimal system configurations. They can also be used at runtime, e.g., to check if non-functional requirements are still satisfied after environmental changes, or to select new configurations after such changes. However, current PMC techniques do not scale well to systems with complex behaviour and more than a few parameters. Our paper introduces a fast PMC (fPMC) approach that overcomes this limitation, extending the applicability of PMC to a broader class of systems than previously possible. To this end, fPMC partitions the Markov models that PMC operates with into \emph{fragments} whose reachability properties are analysed independently, and obtains PMC reachability formulae by combining the results of these fragment analyses. To demonstrate the effectiveness of fPMC, we show how our fPMC tool can analyse three systems (taken from the research literature, and belonging to different application domains) with which current PMC techniques and tools struggle.