 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBORM: Bayesian Object Relation Model for Indoor Scene Recognition
Aug 01, 2021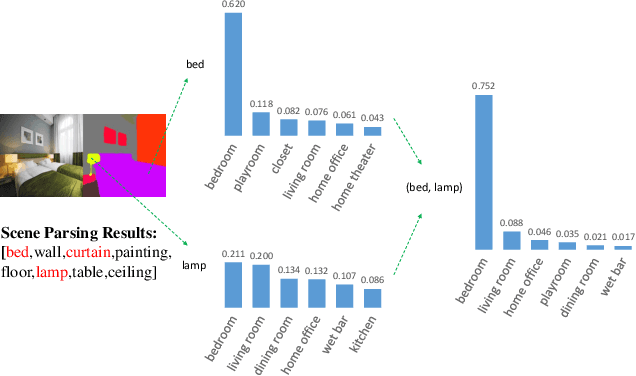
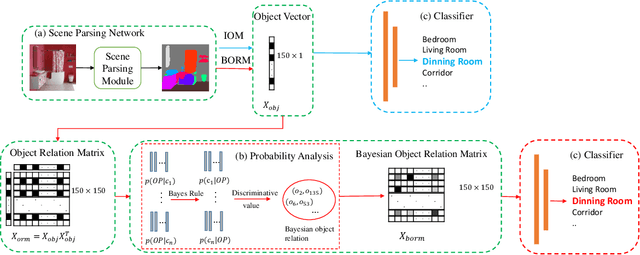
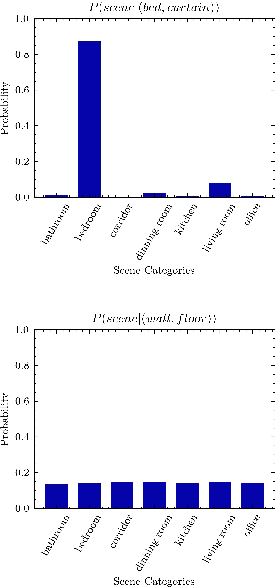
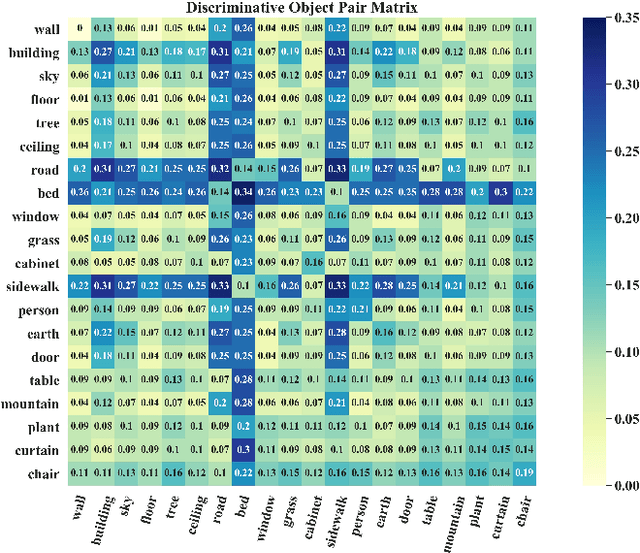
Scene recognition is a fundamental task in robotic perception. For human beings, scene recognition is reasonable because they have abundant object knowledge of the real world. The idea of transferring prior object knowledge from humans to scene recognition is significant but still less exploited. In this paper, we propose to utilize meaningful object representations for indoor scene representation. First, we utilize an improved object model (IOM) as a baseline that enriches the object knowledge by introducing a scene parsing algorithm pretrained on the ADE20K dataset with rich object categories related to the indoor scene. To analyze the object co-occurrences and pairwise object relations, we formulate the IOM from a Bayesian perspective as the Bayesian object relation model (BORM). Meanwhile, we incorporate the proposed BORM with the PlacesCNN model as the combined Bayesian object relation model (CBORM) for scene recognition and significantly outperforms the state-of-the-art methods on the reduced Places365 dataset, and SUN RGB-D dataset without retraining, showing the excellent generalization ability of the proposed method. Code can be found at https://github.com/hszhoushen/borm.
* 8 pages, 5 figures, conference, Accepted by IROS2021