 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA 26-Gram Butterfly-Inspired Robot Achieving Autonomous Tailless Flight
Feb 06, 2026Flapping-wing micro air vehicles (FWMAVs) have demonstrated remarkable bio-inspired agility, yet tailless two-winged configurations remain largely unexplored due to their complex fluid-structure and wing-body coupling. Here we present \textit{AirPulse}, a 26-gram butterfly-inspired FWMAV that achieves fully onboard, closed-loop, untethered flight without auxiliary control surfaces. The AirPulse robot replicates key biomechanical traits of butterfly flight, including low wing aspect ratio, compliant carbon-fiber-reinforced wings, and low-frequency, high-amplitude flapping that induces cyclic variations in the center of gravity and moment of inertia, producing characteristic body undulation. We establish a quantitative mapping between flapping modulation parameters and force-torque generation, and introduce the Stroke Timing Asymmetry Rhythm (STAR) generator, enabling smooth, stable, and linearly parameterized wingstroke asymmetry for flapping control. Integrating these with an attitude controller, the AirPulse robot maintains pitch and yaw stability despite strong oscillatory dynamics. Free-flight experiments demonstrate stable climbing and turning maneuvers via either angle offset or stroke timing modulation, marking the first onboard controlled flight of the lightest two-winged, tailless butterfly-inspired FWMAV reported in peer-reviewed literature. This work corroborates a foundational platform for lightweight, collision-proof FWMAVs, bridging biological inspiration with practical aerial robotics. Their non-invasive maneuverability is ideally suited for real-world applications, such as confined-space inspection and ecological monitoring, inaccessible to traditional drones, while their biomechanical fidelity provides a physical model to decode the principles underlying the erratic yet efficient flight of real butterflies.
Generative Market Equilibrium Models with Stable Adversarial Learning via Reinforcement
Apr 05, 2025



We present a general computational framework for solving continuous-time financial market equilibria under minimal modeling assumptions while incorporating realistic financial frictions, such as trading costs, and supporting multiple interacting agents. Inspired by generative adversarial networks (GANs), our approach employs a novel generative deep reinforcement learning framework with a decoupling feedback system embedded in the adversarial training loop, which we term as the \emph{reinforcement link}. This architecture stabilizes the training dynamics by incorporating feedback from the discriminator. Our theoretically guided feedback mechanism enables the decoupling of the equilibrium system, overcoming challenges that hinder conventional numerical algorithms. Experimentally, our algorithm not only learns but also provides testable predictions on how asset returns and volatilities emerge from the endogenous trading behavior of market participants, where traditional analytical methods fall short. The design of our model is further supported by an approximation guarantee.
Sublinear Time Numerical Linear Algebra for Structured Matrices
Dec 12, 2019We show how to solve a number of problems in numerical linear algebra, such as least squares regression, $\ell_p$-regression for any $p \geq 1$, low rank approximation, and kernel regression, in time $T(A) \poly(\log(nd))$, where for a given input matrix $A \in \mathbb{R}^{n \times d}$, $T(A)$ is the time needed to compute $A\cdot y$ for an arbitrary vector $y \in \mathbb{R}^d$. Since $T(A) \leq O(\nnz(A))$, where $\nnz(A)$ denotes the number of non-zero entries of $A$, the time is no worse, up to polylogarithmic factors, as all of the recent advances for such problems that run in input-sparsity time. However, for many applications, $T(A)$ can be much smaller than $\nnz(A)$, yielding significantly sublinear time algorithms. For example, in the overconstrained $(1+\epsilon)$-approximate polynomial interpolation problem, $A$ is a Vandermonde matrix and $T(A) = O(n \log n)$; in this case our running time is $n \cdot \poly(\log n) + \poly(d/\epsilon)$ and we recover the results of \cite{avron2013sketching} as a special case. For overconstrained autoregression, which is a common problem arising in dynamical systems, $T(A) = O(n \log n)$, and we immediately obtain $n \cdot \poly(\log n) + \poly(d/\epsilon)$ time. For kernel autoregression, we significantly improve the running time of prior algorithms for general kernels. For the important case of autoregression with the polynomial kernel and arbitrary target vector $b\in\mathbb{R}^n$, we obtain even faster algorithms. Our algorithms show that, perhaps surprisingly, most of these optimization problems do not require much more time than that of a polylogarithmic number of matrix-vector multiplications.
On Strategyproof Conference Peer Review
Jun 16, 2018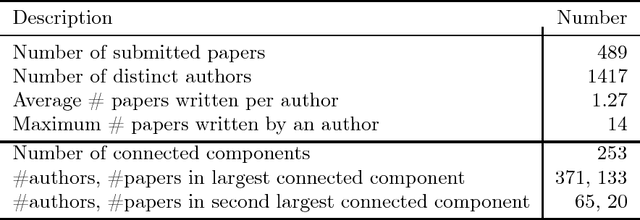
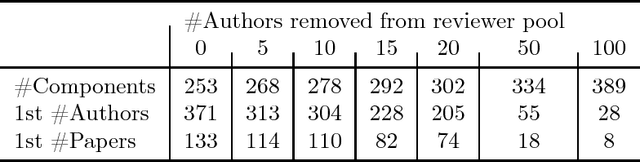
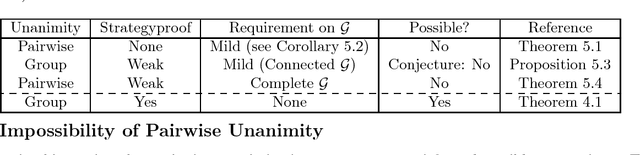
We consider peer review in a conference setting where there is typically an overlap between the set of reviewers and the set of authors. This overlap can incentivize strategic reviews to influence the final ranking of one's own papers. In this work, we address this problem through the lens of social choice, and present a theoretical framework for strategyproof and efficient peer review. We first present and analyze an algorithm for reviewer-assignment and aggregation that guarantees strategyproofness and a natural efficiency property called unanimity, when the authorship graph satisfies a simple property. Our algorithm is based on the so-called partitioning method, and can be thought as a generalization of this method to conference peer review settings. We then empirically show that the requisite property on the authorship graph is indeed satisfied in the ICLR-17 submission data, and further demonstrate a simple trick to make the partitioning method more practically appealing for conference peer review. Finally, we complement our positive results with negative theoretical results where we prove that under various ways of strengthening the requirements, it is impossible for any algorithm to be strategyproof and efficient.