 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMyGram: Modality-aware Graph Transformer with Global Distribution for Multi-modal Entity Alignment
Jan 17, 2026Multi-modal entity alignment aims to identify equivalent entities between two multi-modal Knowledge graphs by integrating multi-modal data, such as images and text, to enrich the semantic representations of entities. However, existing methods may overlook the structural contextual information within each modality, making them vulnerable to interference from shallow features. To address these challenges, we propose MyGram, a modality-aware graph transformer with global distribution for multi-modal entity alignment. Specifically, we develop a modality diffusion learning module to capture deep structural contextual information within modalities and enable fine-grained multi-modal fusion. In addition, we introduce a Gram Loss that acts as a regularization constraint by minimizing the volume of a 4-dimensional parallelotope formed by multi-modal features, thereby achieving global distribution consistency across modalities. We conduct experiments on five public datasets. Results show that MyGram outperforms baseline models, achieving a maximum improvement of 4.8% in Hits@1 on FBDB15K, 9.9% on FBYG15K, and 4.3% on DBP15K.
LEO-RobotAgent: A General-purpose Robotic Agent for Language-driven Embodied Operator
Dec 11, 2025We propose LEO-RobotAgent, a general-purpose language-driven intelligent agent framework for robots. Under this framework, LLMs can operate different types of robots to complete unpredictable complex tasks across various scenarios. This framework features strong generalization, robustness, and efficiency. The application-level system built around it can fully enhance bidirectional human-robot intent understanding and lower the threshold for human-robot interaction. Regarding robot task planning, the vast majority of existing studies focus on the application of large models in single-task scenarios and for single robot types. These algorithms often have complex structures and lack generalizability. Thus, the proposed LEO-RobotAgent framework is designed with a streamlined structure as much as possible, enabling large models to independently think, plan, and act within this clear framework. We provide a modular and easily registrable toolset, allowing large models to flexibly call various tools to meet different requirements. Meanwhile, the framework incorporates a human-robot interaction mechanism, enabling the algorithm to collaborate with humans like a partner. Experiments have verified that this framework can be easily adapted to mainstream robot platforms including unmanned aerial vehicles (UAVs), robotic arms, and wheeled robot, and efficiently execute a variety of carefully designed tasks with different complexity levels. Our code is available at https://github.com/LegendLeoChen/LEO-RobotAgent.
Hippocampus-heuristic Character Recognition Network for Zero-shot Learning
Apr 06, 2021
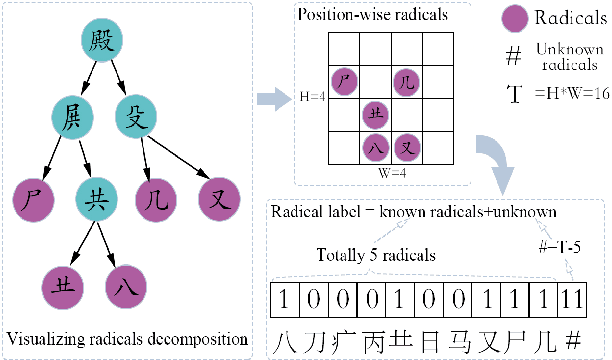
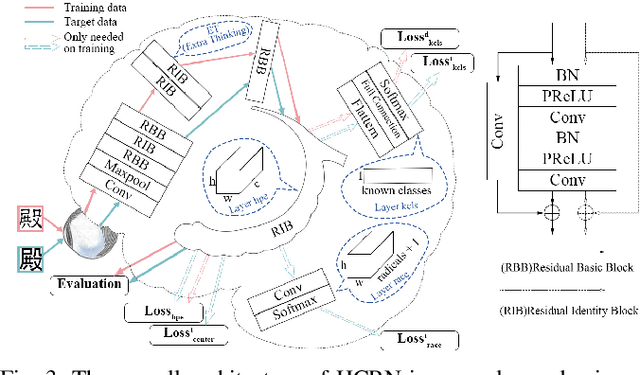
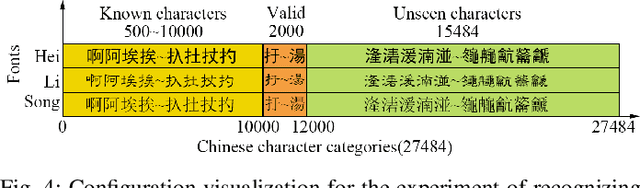
The recognition of Chinese characters has always been a challenging task due to their huge variety and complex structures. The latest research proves that such an enormous character set can be decomposed into a collection of about 500 fundamental Chinese radicals, and based on which this problem can be solved effectively. While with the constant advent of novel Chinese characters, the number of basic radicals is also expanding. The current methods that entirely rely on existing radicals are not flexible for identifying these novel characters and fail to recognize these Chinese characters without learning all of their radicals in the training stage. To this end, this paper proposes a novel Hippocampus-heuristic Character Recognition Network (HCRN), which references the way of hippocampus thinking, and can recognize unseen Chinese characters (namely zero-shot learning) only by training part of radicals. More specifically, the network architecture of HCRN is a new pseudo-siamese network designed by us, which can learn features from pairs of input training character samples and use them to predict unseen Chinese characters. The experimental results show that HCRN is robust and effective. It can accurately predict about 16,330 unseen testing Chinese characters relied on only 500 trained Chinese characters. The recognition accuracy of HCRN outperforms the state-of-the-art Chinese radical recognition approach by 15% (from 85.1% to 99.9%) for recognizing unseen Chinese characters.