 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAcademiClaw: When Students Set Challenges for AI Agents
May 04, 2026Benchmarks within the OpenClaw ecosystem have thus far evaluated exclusively assistant-level tasks, leaving the academic-level capabilities of OpenClaw largely unexamined. We introduce AcademiClaw, a bilingual benchmark of 80 complex, long-horizon tasks sourced directly from university students' real academic workflows -- homework, research projects, competitions, and personal projects -- that they found current AI agents unable to solve effectively. Curated from 230 student-submitted candidates through rigorous expert review, the final task set spans 25+ professional domains, ranging from olympiad-level mathematics and linguistics problems to GPU-intensive reinforcement learning and full-stack system debugging, with 16 tasks requiring CUDA GPU execution. Each task executes in an isolated Docker sandbox and is scored on task completion by multi-dimensional rubrics combining six complementary techniques, with an independent five-category safety audit providing additional behavioral analysis. Experiments on six frontier models show that even the best achieves only a 55\% pass rate. Further analysis uncovers sharp capability boundaries across task domains, divergent behavioral strategies among models, and a disconnect between token consumption and output quality, providing fine-grained diagnostic signals beyond what aggregate metrics reveal. We hope that AcademiClaw and its open-sourced data and code can serve as a useful resource for the OpenClaw community, driving progress toward agents that are more capable and versatile across the full breadth of real-world academic demands. All data and code are available at https://github.com/GAIR-NLP/AcademiClaw.
daVinci-LLM:Towards the Science of Pretraining
Mar 28, 2026The foundational pretraining phase determines a model's capability ceiling, as post-training struggles to overcome capability foundations established during pretraining, yet it remains critically under-explored. This stems from a structural paradox: organizations with computational resources operate under commercial pressures that inhibit transparent disclosure, while academic institutions possess research freedom but lack pretraining-scale computational resources. daVinci-LLM occupies this unexplored intersection, combining industrial-scale resources with full research freedom to advance the science of pretraining. We adopt a fully-open paradigm that treats openness as scientific methodology, releasing complete data processing pipelines, full training processes, and systematic exploration results. Recognizing that the field lacks systematic methodology for data processing, we employ the Data Darwinism framework, a principled L0-L9 taxonomy from filtering to synthesis. We train a 3B-parameter model from random initialization across 8T tokens using a two-stage adaptive curriculum that progressively shifts from foundational capabilities to reasoning-intensive enhancement. Through 200+ controlled ablations, we establish that: processing depth systematically enhances capabilities, establishing it as a critical dimension alongside volume scaling; different domains exhibit distinct saturation dynamics, necessitating adaptive strategies from proportion adjustments to format shifts; compositional balance enables targeted intensification while preventing performance collapse; how evaluation protocol choices shape our understanding of pretraining progress. By releasing the complete exploration process, we enable the community to build upon our findings and systematic methodologies to form accumulative scientific knowledge in pretraining.
Data Darwinism Part I: Unlocking the Value of Scientific Data for Pre-training
Feb 08, 2026Data quality determines foundation model performance, yet systematic processing frameworks are lacking. We introduce Data Darwinism, a ten-level taxonomy (L0-L9) that conceptualizes data-model co-evolution: advanced models produce superior data for next-generation systems. We validate this on scientific literature by constructing Darwin-Science, a 900B-token corpus (L0-L5). We identify a learnability gap in raw scientific text, which we bridge via L4 (Generative Refinement) and L5 (Cognitive Completion) using frontier LLMs to explicate reasoning and terminology. To ensure rigorous attribution, we pre-trained daVinci-origin-3B/7B models from scratch, excluding scientific content to create contamination-free baselines. After 600B tokens of continued pre-training, Darwin-Science outperforms baselines by +2.12 (3B) and +2.95 (7B) points across 20+ benchmarks, rising to +5.60 and +8.40 points on domain-aligned tasks. Systematic progression to L5 yields a +1.36 total gain, confirming that higher-level processing unlocks latent data value. We release the Darwin-Science corpus and daVinci-origin models to enable principled, co-evolutionary development.
daVinci-Agency: Unlocking Long-Horizon Agency Data-Efficiently
Feb 02, 2026While Large Language Models (LLMs) excel at short-term tasks, scaling them to long-horizon agentic workflows remains challenging. The core bottleneck lies in the scarcity of training data that captures authentic long-dependency structures and cross-stage evolutionary dynamics--existing synthesis methods either confine to single-feature scenarios constrained by model distribution, or incur prohibitive human annotation costs, failing to provide scalable, high-quality supervision. We address this by reconceptualizing data synthesis through the lens of real-world software evolution. Our key insight: Pull Request (PR) sequences naturally embody the supervision signals for long-horizon learning. They decompose complex objectives into verifiable submission units, maintain functional coherence across iterations, and encode authentic refinement patterns through bug-fix histories. Building on this, we propose daVinci-Agency, which systematically mines structured supervision from chain-of-PRs through three interlocking mechanisms: (1) progressive task decomposition via continuous commits, (2) long-term consistency enforcement through unified functional objectives, and (3) verifiable refinement from authentic bug-fix trajectories. Unlike synthetic trajectories that treat each step independently, daVinci-Agency's PR-grounded structure inherently preserves the causal dependencies and iterative refinements essential for teaching persistent goal-directed behavior and enables natural alignment with project-level, full-cycle task modeling. The resulting trajectories are substantial--averaging 85k tokens and 116 tool calls--yet remarkably data-efficient: fine-tuning GLM-4.6 on 239 daVinci-Agency samples yields broad improvements across benchmarks, notably achieving a 47% relative gain on Toolathlon. Beyond benchmark performance, our analysis confirms...
AgencyBench: Benchmarking the Frontiers of Autonomous Agents in 1M-Token Real-World Contexts
Jan 16, 2026Large Language Models (LLMs) based autonomous agents demonstrate multifaceted capabilities to contribute substantially to economic production. However, existing benchmarks remain focused on single agentic capability, failing to capture long-horizon real-world scenarios. Moreover, the reliance on human-in-the-loop feedback for realistic tasks creates a scalability bottleneck, hindering automated rollout collection and evaluation. To bridge this gap, we introduce AgencyBench, a comprehensive benchmark derived from daily AI usage, evaluating 6 core agentic capabilities across 32 real-world scenarios, comprising 138 tasks with specific queries, deliverables, and rubrics. These scenarios require an average of 90 tool calls, 1 million tokens, and hours of execution time to resolve. To enable automated evaluation, we employ a user simulation agent to provide iterative feedback, and a Docker sandbox to conduct visual and functional rubric-based assessment. Experiments reveal that closed-source models significantly outperform open-source models (48.4% vs 32.1%). Further analysis reveals significant disparities across models in resource efficiency, feedback-driven self-correction, and specific tool-use preferences. Finally, we investigate the impact of agentic scaffolds, observing that proprietary models demonstrate superior performance within their native ecosystems (e.g., Claude-4.5-Opus via Claude-Agent-SDK), while open-source models exhibit distinct performance peaks, suggesting potential optimization for specific execution frameworks. AgencyBench serves as a critical testbed for next-generation agents, highlighting the necessity of co-optimizing model architecture with agentic frameworks. We believe this work sheds light on the future direction of autonomous agents, and we release the full benchmark and evaluation toolkit at https://github.com/GAIR-NLP/AgencyBench.
Interaction as Intelligence Part II: Asynchronous Human-Agent Rollout for Long-Horizon Task Training
Nov 03, 2025Large Language Model (LLM) agents have recently shown strong potential in domains such as automated coding, deep research, and graphical user interface manipulation. However, training them to succeed on long-horizon, domain-specialized tasks remains challenging. Current methods primarily fall into two categories. The first relies on dense human annotations through behavior cloning, which is prohibitively expensive for long-horizon tasks that can take days or months. The second depends on outcome-driven sampling, which often collapses due to the rarity of valid positive trajectories on domain-specialized tasks. We introduce Apollo, a sampling framework that integrates asynchronous human guidance with action-level data filtering. Instead of requiring annotators to shadow every step, Apollo allows them to intervene only when the agent drifts from a promising trajectory, by providing prior knowledge, strategic advice, etc. This lightweight design makes it possible to sustain interactions for over 30 hours and produces valuable trajectories at a lower cost. Apollo then applies supervision control to filter out sub-optimal actions and prevent error propagation. Together, these components enable reliable and effective data collection in long-horizon environments. To demonstrate the effectiveness of Apollo, we evaluate it using InnovatorBench. Our experiments show that when applied to train the GLM-4.5 model on InnovatorBench, Apollo achieves more than a 50% improvement over the untrained baseline and a 28% improvement over a variant trained without human interaction. These results highlight the critical role of human-in-the-loop sampling and the robustness of Apollo's design in handling long-horizon, domain-specialized tasks.
InnovatorBench: Evaluating Agents' Ability to Conduct Innovative LLM Research
Nov 03, 2025
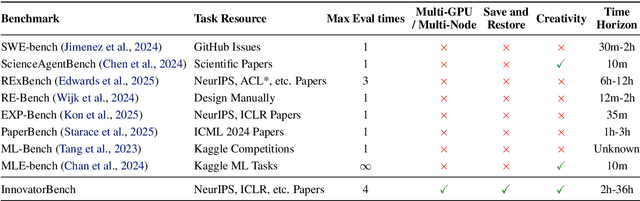


AI agents could accelerate scientific discovery by automating hypothesis formation, experiment design, coding, execution, and analysis, yet existing benchmarks probe narrow skills in simplified settings. To address this gap, we introduce InnovatorBench, a benchmark-platform pair for realistic, end-to-end assessment of agents performing Large Language Model (LLM) research. It comprises 20 tasks spanning Data Construction, Filtering, Augmentation, Loss Design, Reward Design, and Scaffold Construction, which require runnable artifacts and assessment of correctness, performance, output quality, and uncertainty. To support agent operation, we develop ResearchGym, a research environment offering rich action spaces, distributed and long-horizon execution, asynchronous monitoring, and snapshot saving. We also implement a lightweight ReAct agent that couples explicit reasoning with executable planning using frontier models such as Claude-4, GPT-5, GLM-4.5, and Kimi-K2. Our experiments demonstrate that while frontier models show promise in code-driven research tasks, they struggle with fragile algorithm-related tasks and long-horizon decision making, such as impatience, poor resource management, and overreliance on template-based reasoning. Furthermore, agents require over 11 hours to achieve their best performance on InnovatorBench, underscoring the benchmark's difficulty and showing the potential of InnovatorBench to be the next generation of code-based research benchmark.