 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemoryVLA++: Temporal Modeling via Memory and Imagination in Vision-Language-Action Models
Jun 08, 2026Temporal modeling is essential for robotic manipulation, as effective control requires both memory of past interactions and imagination of future states. However, most VLA models rely primarily on the current observation and therefore struggle with long-horizon, temporally dependent tasks. Cognitive science suggests that humans rely on working memory to buffer short-lived context, the hippocampal system to preserve episodic memory of past experience, and internal models to imagine possible future state evolution. Inspired by these mechanisms, we propose MemoryVLA++, a full temporal modeling framework that equips VLA models with memory and imagination for robotic manipulation. A pretrained VLM encodes the current observation into perceptual and cognitive tokens, forming working memory. These tokens query a Perceptual-Cognitive Memory Bank to retrieve relevant historical context. This bank stores low-level details and high-level semantics from past interactions, and is updated through redundancy-aware consolidation. A world model imagines future states in a denoising latent space, and the imagined latents are integrated under memory guidance to form full temporal-aware tokens. The resulting tokens condition a diffusion action expert to predict temporally consistent action sequences. We conduct extensive experiments on 5 simulation benchmarks and 3 categories of real-robot tasks across 3 robots, covering general manipulation, long-horizon temporal tasks, robustness, and generalization. Our method achieves strong performance across Libero, SimplerEnv, Mikasa-Robo, Calvin, Libero-Plus, and diverse real-robot tasks, validating the effectiveness of full temporal modeling with memory and imagination. For example, on real robots, it achieves +9%, +26%, +28% gains on general, memory-dependent, and imagination-dependent tasks. Project Page: https://shihao1895.github.io/MemoryVLA-PP-Web
Approximate Maximum Likelihood Inference for Acoustic Spatial Capture-Recapture with Unknown Identities, Using Monte Carlo Expectation Maximization
Oct 06, 2024



Acoustic spatial capture-recapture (ASCR) surveys with an array of synchronized acoustic detectors can be an effective way of estimating animal density or call density. However, constructing the capture histories required for ASCR analysis is challenging, as recognizing which detections at different detectors are of which calls is not a trivial task. Because calls from different distances take different times to arrive at detectors, the order in which calls are detected is not necessarily the same as the order in which they are made, and without knowing which detections are of the same call, we do not know how many different calls are detected. We propose a Monte Carlo expectation-maximization (MCEM) estimation method to resolve this unknown call identity problem. To implement the MCEM method in this context, we sample the latent variables from a complete-data likelihood model in the expectation step and use a semi-complete-data likelihood or conditional likelihood in the maximization step. We use a parametric bootstrap to obtain confidence intervals. When we apply our method to a survey of moss frogs, it gives an estimate within 15% of the estimate obtained using data with call capture histories constructed by experts, and unlike this latter estimate, our confidence interval incorporates the uncertainty about call identities. Simulations show it to have a low bias (6%) and coverage probabilities close to the nominal 95% value.
Artwork Protection Against Neural Style Transfer Using Locally Adaptive Adversarial Color Attack
Jan 18, 2024



Neural style transfer (NST) is widely adopted in computer vision to generate new images with arbitrary styles. This process leverages neural networks to merge aesthetic elements of a style image with the structural aspects of a content image into a harmoniously integrated visual result. However, unauthorized NST can exploit artwork. Such misuse raises socio-technical concerns regarding artists' rights and motivates the development of technical approaches for the proactive protection of original creations. Adversarial attack is a concept primarily explored in machine learning security. Our work introduces this technique to protect artists' intellectual property. In this paper Locally Adaptive Adversarial Color Attack (LAACA), a method for altering images in a manner imperceptible to the human eyes but disruptive to NST. Specifically, we design perturbations targeting image areas rich in high-frequency content, generated by disrupting intermediate features. Our experiments and user study confirm that by attacking NST using the proposed method results in visually worse neural style transfer, thus making it an effective solution for visual artwork protection.
Siamese Networks with Location Prior for Landmark Tracking in Liver Ultrasound Sequences
Jan 23, 2019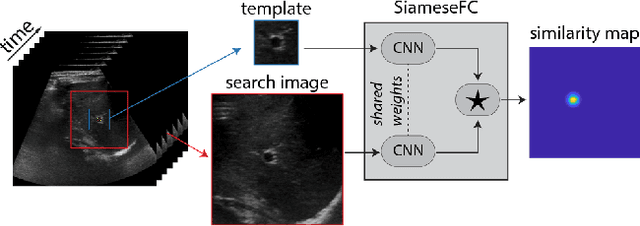
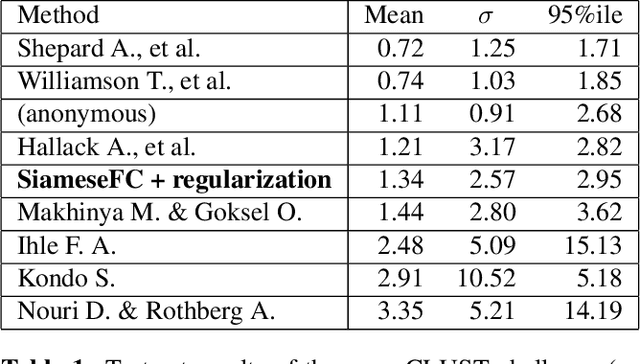
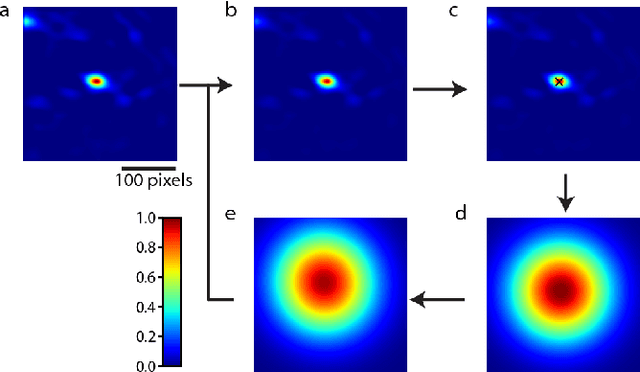
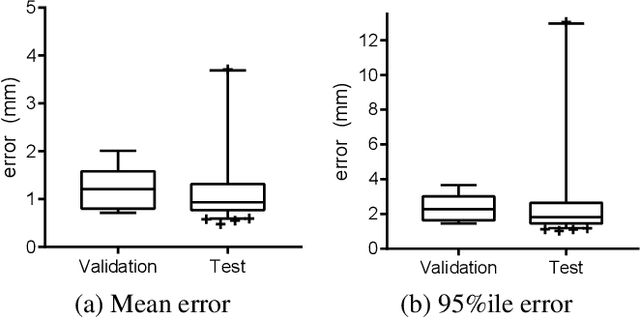
Image-guided radiation therapy can benefit from accurate motion tracking by ultrasound imaging, in order to minimize treatment margins and radiate moving anatomical targets, e.g., due to breathing. One way to formulate this tracking problem is the automatic localization of given tracked anatomical landmarks throughout a temporal ultrasound sequence. For this, we herein propose a fully-convolutional Siamese network that learns the similarity between pairs of image regions containing the same landmark. Accordingly, it learns to localize and thus track arbitrary image features, not only predefined anatomical structures. We employ a temporal consistency model as a location prior, which we combine with the network-predicted location probability map to track a target iteratively in ultrasound sequences. We applied this method on the dataset of the Challenge on Liver Ultrasound Tracking (CLUST) with competitive results, where our work is the first to effectively apply CNNs on this tracking problem, thanks to our temporal regularization.