 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLyapunov-Based Sample Complexity Analysis for Weakly-Coupled MDPs
Jun 12, 2026We study the sample complexity of learning in average-reward weakly-coupled Markov decision processes (WCMDPs) and Restless Bandits (RBs) under a generative model. Naive reduction to a tabular MDP leads to high complexity bounds as the state-action space is exponentially large in the number of arms $N$. By exploiting the weakly coupled structure, we show that near-optimal policies can be learned with sample and computational complexities that are polynomial in $N$. Specifically, we analyze the plug-in approach, which applies an efficient planning algorithm to an empirical model estimated from data. For fully heterogeneous WCMDPs, we establish the first finite-sample PAC guarantee with polynomial complexity and an $O(1/\sqrt{N})$ optimality gap. For homogeneous RBs, we further prove that a smaller optimality gap is achievable under mild structural assumptions. A primary technical contribution of our work is a novel Lyapunov-based analysis framework. Unlike classical approaches that rely on the difficult-to-control bias function, our framework uses an explicitly constructed Lyapunov function along with a drift transfer technique between the true and empirical models. A key step of independent interest in our framework is a fine-grained perturbation analysis for the underlying linear programming (LP) relaxation, which provides a general tool for analyzing LP-based policies and weakly-coupled systems.
Noise Schedule Design for Diffusion Models: An Optimal Control Perspective
May 21, 2026We develop a principled framework for analyzing and designing noise schedules in diffusion models. We show that one can recast this design problem as an optimal control problem, whose state is the Fisher information of the diffusion process which evolves according to an ODE and the control input is the noise schedule. The objective of the optimal control problem is a functional involving the Fisher information, which is shown to be an upper bound on the Kullback-Leibler sampling error. By solving this optimal control problem, we obtain sufficient conditions on noise schedules under which state-of-the-art $\tilde{\mathcal{O}} (d/n)$ sampling error is achievable, where $d$ is the data dimension and $n$ is the number of discretization steps. While existing theoretical work also prove that $\tilde{\mathcal{O}}(d/n)$ sampling error bounds are achievable, these results hold for specific noise schedules, which do not include the schedules used in practice. Under a further parametric assumption on the data distribution, we show that one can obtain closed-form expressions for the noise schedules. These noise schedules generalize standard empirical schedules such as exponential and sigmoid schedules by allowing additional parameters that can be tuned. Systematically tuning the parameters of these schedules yields new schedules that achieve superior FID scores on image generation benchmarks.
ID policy (with reassignment) is asymptotically optimal for heterogeneous weakly-coupled MDPs
Feb 09, 2025Heterogeneity poses a fundamental challenge for many real-world large-scale decision-making problems but remains largely understudied. In this paper, we study the fully heterogeneous setting of a prominent class of such problems, known as weakly-coupled Markov decision processes (WCMDPs). Each WCMDP consists of $N$ arms (or subproblems), which have distinct model parameters in the fully heterogeneous setting, leading to the curse of dimensionality when $N$ is large. We show that, under mild assumptions, a natural adaptation of the ID policy, although originally proposed for a homogeneous special case of WCMDPs, in fact achieves an $O(1/\sqrt{N})$ optimality gap in long-run average reward per arm for fully heterogeneous WCMDPs as $N$ becomes large. This is the first asymptotic optimality result for fully heterogeneous average-reward WCMDPs. Our techniques highlight the construction of a novel projection-based Lyapunov function, which witnesses the convergence of rewards and costs to an optimal region in the presence of heterogeneity.
Achieving O(1/N) Optimality Gap in Restless Bandits through Diffusion Approximation
Oct 19, 2024



We study the finite horizon Restless Multi-Armed Bandit (RMAB) problem with $N$ homogeneous arms, focusing on the challenges posed by degenerate RMABs, which are prevalent in practical applications. While previous work has shown that Linear Programming (LP)-based policies achieve exponentially fast convergence relative to the LP upper bound in non-degenerate models, applying these LP-based policies to degenerate RMABs results in slower convergence rates of $O(1/\sqrt{N})$. We construct a diffusion system that incorporates both the mean and variance of the stochastic processes, in contrast to the fluid system from the LP, which only accounts for the mean, thereby providing a more accurate representation of RMAB dynamics. Consequently, our novel diffusion-resolving policy achieves an optimality gap of $O(1/N)$ relative to the true optimal value, rather than the LP upper bound, revealing that the fluid approximation and the LP upper bound are too loose in degenerate settings. These insights pave the way for constructing policies that surpass the $O(1/\sqrt{N})$ optimality gap for any RMAB, whether degenerate or not.
When is exponential asymptotic optimality achievable in average-reward restless bandits?
May 28, 2024



We consider the discrete-time infinite-horizon average-reward restless bandit problem. We propose a novel policy that maintains two dynamic subsets of arms: one subset of arms has a nearly optimal state distribution and takes actions according to an Optimal Local Control routine; the other subset of arms is driven towards the optimal state distribution and gradually merged into the first subset. We show that our policy is asymptotically optimal with an $O(\exp(-C N))$ optimality gap for an $N$-armed problem, under the mild assumptions of aperiodic-unichain, non-degeneracy, and local stability. Our policy is the first to achieve exponential asymptotic optimality under the above set of easy-to-verify assumptions, whereas prior work either requires a strong Global Attractor assumption or only achieves an $O(1/\sqrt{N})$ optimality gap. We further discuss the fundamental obstacles in significantly weakening our assumptions. In particular, we prove a lower bound showing that local stability is fundamental for exponential asymptotic optimality.
Unichain and Aperiodicity are Sufficient for Asymptotic Optimality of Average-Reward Restless Bandits
Feb 08, 2024


We consider the infinite-horizon, average-reward restless bandit problem in discrete time. We propose a new class of policies that are designed to drive a progressively larger subset of arms toward the optimal distribution. We show that our policies are asymptotically optimal with an $O(1/\sqrt{N})$ optimality gap for an $N$-armed problem, provided that the single-armed relaxed problem is unichain and aperiodic. Our approach departs from most existing work that focuses on index or priority policies, which rely on the Uniform Global Attractor Property (UGAP) to guarantee convergence to the optimum, or a recently developed simulation-based policy, which requires a Synchronization Assumption (SA).
Efficient Reinforcement Learning for Routing Jobs in Heterogeneous Queueing Systems
Feb 02, 2024



We consider the problem of efficiently routing jobs that arrive into a central queue to a system of heterogeneous servers. Unlike homogeneous systems, a threshold policy, that routes jobs to the slow server(s) when the queue length exceeds a certain threshold, is known to be optimal for the one-fast-one-slow two-server system. But an optimal policy for the multi-server system is unknown and non-trivial to find. While Reinforcement Learning (RL) has been recognized to have great potential for learning policies in such cases, our problem has an exponentially large state space size, rendering standard RL inefficient. In this work, we propose ACHQ, an efficient policy gradient based algorithm with a low dimensional soft threshold policy parameterization that leverages the underlying queueing structure. We provide stationary-point convergence guarantees for the general case and despite the low-dimensional parameterization prove that ACHQ converges to an approximate global optimum for the special case of two servers. Simulations demonstrate an improvement in expected response time of up to ~30% over the greedy policy that routes to the fastest available server.
Restless Bandits with Average Reward: Breaking the Uniform Global Attractor Assumption
May 31, 2023We study the infinite-horizon restless bandit problem with the average reward criterion, under both discrete-time and continuous-time settings. A fundamental question is how to design computationally efficient policies that achieve a diminishing optimality gap as the number of arms, $N$, grows large. Existing results on asymptotical optimality all rely on the uniform global attractor property (UGAP), a complex and challenging-to-verify assumption. In this paper, we propose a general, simulation-based framework that converts any single-armed policy into a policy for the original $N$-armed problem. This is accomplished by simulating the single-armed policy on each arm and carefully steering the real state towards the simulated state. Our framework can be instantiated to produce a policy with an $O(1/\sqrt{N})$ optimality gap. In the discrete-time setting, our result holds under a simpler synchronization assumption, which covers some problem instances that do not satisfy UGAP. More notably, in the continuous-time setting, our result does not require any additional assumptions beyond the standard unichain condition. In both settings, we establish the first asymptotic optimality result that does not require UGAP.
Sample Efficient Reinforcement Learning in Mixed Systems through Augmented Samples and Its Applications to Queueing Networks
May 25, 2023



This paper considers a class of reinforcement learning problems, which involve systems with two types of states: stochastic and pseudo-stochastic. In such systems, stochastic states follow a stochastic transition kernel while the transitions of pseudo-stochastic states are deterministic given the stochastic states/transitions. We refer to such systems as mixed systems, which are widely used in various applications, including manufacturing systems, communication networks, and queueing networks. We propose a sample efficient RL method that accelerates learning by generating augmented data samples. The proposed algorithm is data-driven and learns the policy from data samples from both real and augmented samples. This method significantly improves learning by reducing the sample complexity such that the dataset only needs to have sufficient coverage of the stochastic states. We analyze the sample complexity of the proposed method under Fitted Q Iteration (FQI) and demonstrate that the optimality gap decreases as $\tilde{\mathcal{O}}(\sqrt{{1}/{n}}+\sqrt{{1}/{m}}),$ where $n$ is the number of real samples and $m$ is the number of augmented samples per real sample. It is important to note that without augmented samples, the optimality gap is $\tilde{\mathcal{O}}(1)$ due to insufficient data coverage of the pseudo-stochastic states. Our experimental results on multiple queueing network applications confirm that the proposed method indeed significantly accelerates learning in both deep Q-learning and deep policy gradient.
Job Dispatching Policies for Queueing Systems with Unknown Service Rates
Jun 10, 2021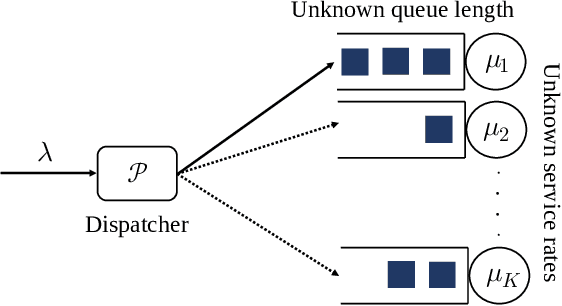
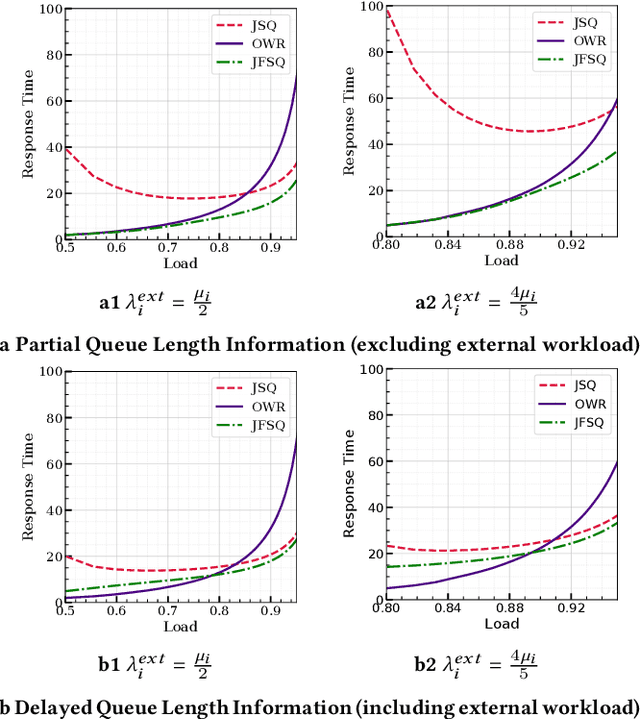
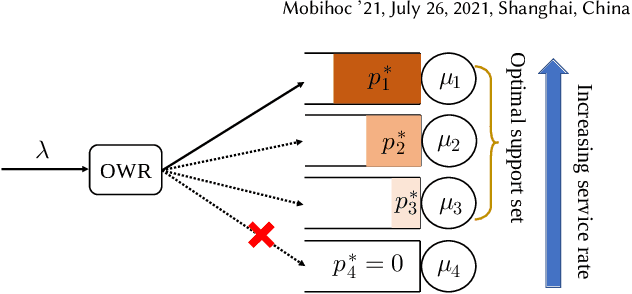
In multi-server queueing systems where there is no central queue holding all incoming jobs, job dispatching policies are used to assign incoming jobs to the queue at one of the servers. Classic job dispatching policies such as join-the-shortest-queue and shortest expected delay assume that the service rates and queue lengths of the servers are known to the dispatcher. In this work, we tackle the problem of job dispatching without the knowledge of service rates and queue lengths, where the dispatcher can only obtain noisy estimates of the service rates by observing job departures. This problem presents a novel exploration-exploitation trade-off between sending jobs to all the servers to estimate their service rates, and exploiting the currently known fastest servers to minimize the expected queueing delay. We propose a bandit-based exploration policy that learns the service rates from observed job departures. Unlike the standard multi-armed bandit problem where only one out of a finite set of actions is optimal, here the optimal policy requires identifying the optimal fraction of incoming jobs to be sent to each server. We present a regret analysis and simulations to demonstrate the effectiveness of the proposed bandit-based exploration policy.