 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Manipulate Tools by Aligning Simulation to Video Demonstration
Nov 04, 2021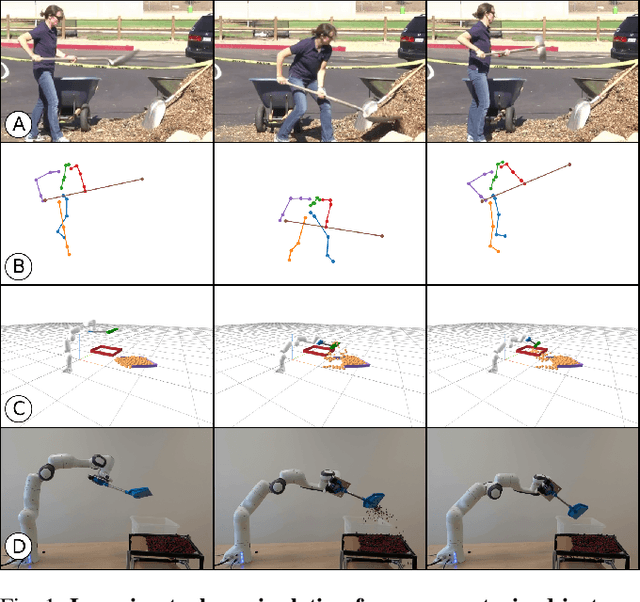


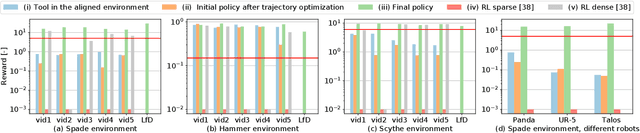
A seamless integration of robots into human environments requires robots to learn how to use existing human tools. Current approaches for learning tool manipulation skills mostly rely on expert demonstrations provided in the target robot environment, for example, by manually guiding the robot manipulator or by teleoperation. In this work, we introduce an automated approach that replaces an expert demonstration with a Youtube video for learning a tool manipulation strategy. The main contributions are twofold. First, we design an alignment procedure that aligns the simulated environment with the real-world scene observed in the video. This is formulated as an optimization problem that finds a spatial alignment of the tool trajectory to maximize the sparse goal reward given by the environment. Second, we describe an imitation learning approach that focuses on the trajectory of the tool rather than the motion of the human. For this we combine reinforcement learning with an optimization procedure to find a control policy and the placement of the robot based on the tool motion in the aligned environment. We demonstrate the proposed approach on spade, scythe and hammer tools in simulation, and show the effectiveness of the trained policy for the spade on a real Franka Emika Panda robot demonstration.
Learning Object Manipulation Skills via Approximate State Estimation from Real Videos
Nov 13, 2020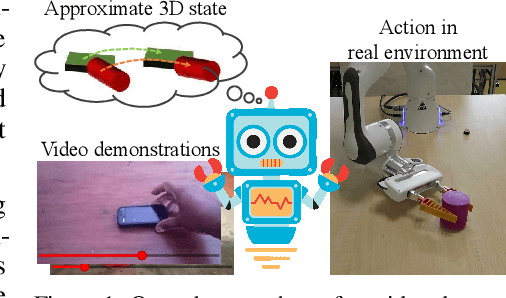
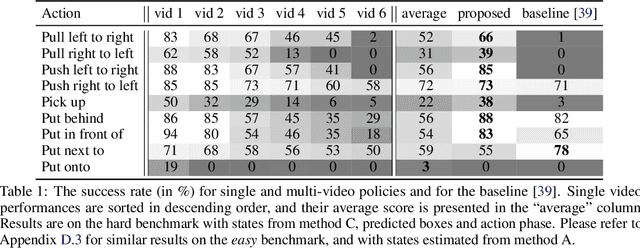
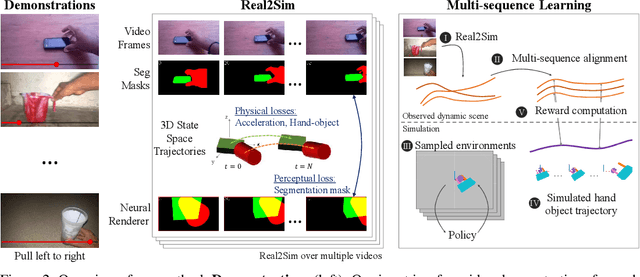
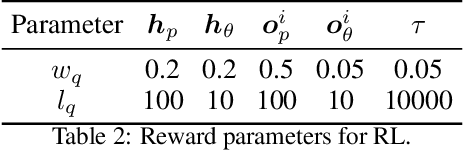
Humans are adept at learning new tasks by watching a few instructional videos. On the other hand, robots that learn new actions either require a lot of effort through trial and error, or use expert demonstrations that are challenging to obtain. In this paper, we explore a method that facilitates learning object manipulation skills directly from videos. Leveraging recent advances in 2D visual recognition and differentiable rendering, we develop an optimization based method to estimate a coarse 3D state representation for the hand and the manipulated object(s) without requiring any supervision. We use these trajectories as dense rewards for an agent that learns to mimic them through reinforcement learning. We evaluate our method on simple single- and two-object actions from the Something-Something dataset. Our approach allows an agent to learn actions from single videos, while watching multiple demonstrations makes the policy more robust. We show that policies learned in a simulated environment can be easily transferred to a real robot.
Feedback-based Fabric Strip Folding
Apr 02, 2019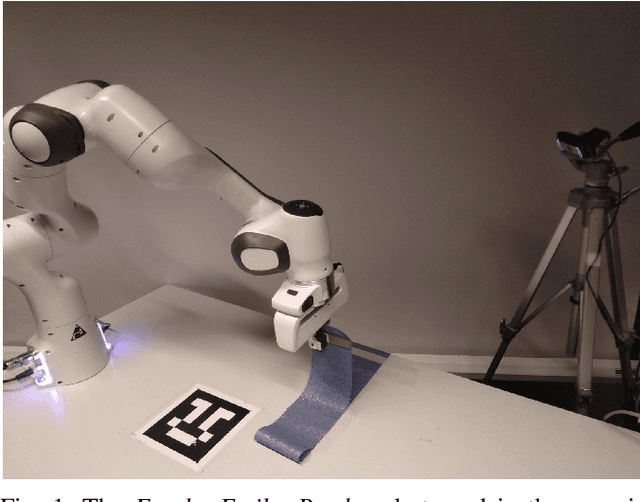

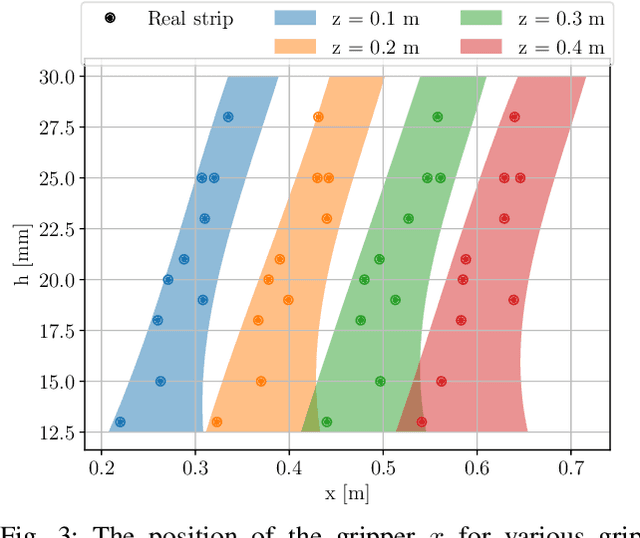
Accurate manipulation of a deformable body such as a piece of fabric is difficult because of its many degrees of freedom and unobservable properties affecting its dynamics. To alleviate these challenges, we propose the application of feedback-based control to robotic fabric strip folding. The feedback is computed from the low dimensional state extracted from a camera image. We trained the controller using reinforcement learning in simulation which was calibrated to cover the real fabric strip behaviors. The proposed feedback-based folding was experimentally compared to two state-of-the-art folding methods and our method outperformed both of them in terms of accuracy.
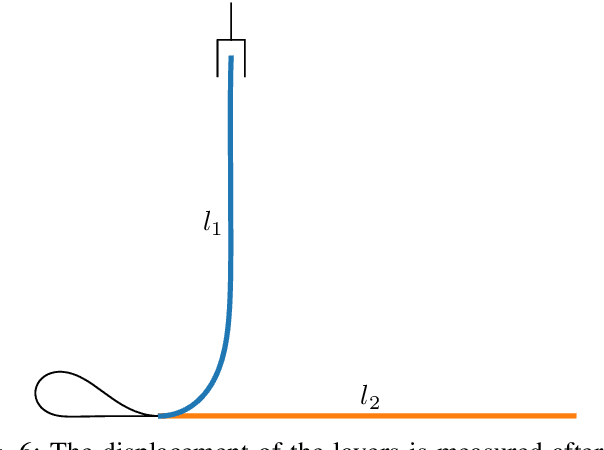
Static Stability of Robotic Fabric Strip Folding
Feb 28, 2019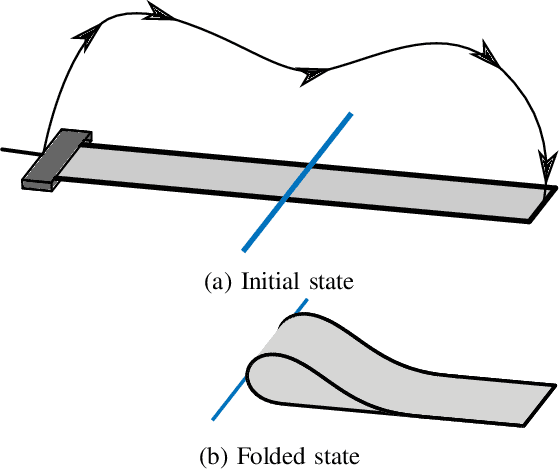
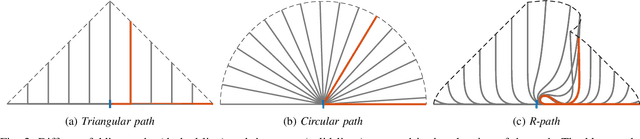
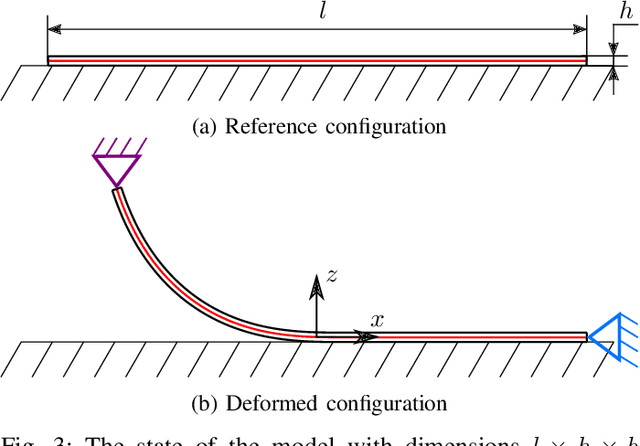
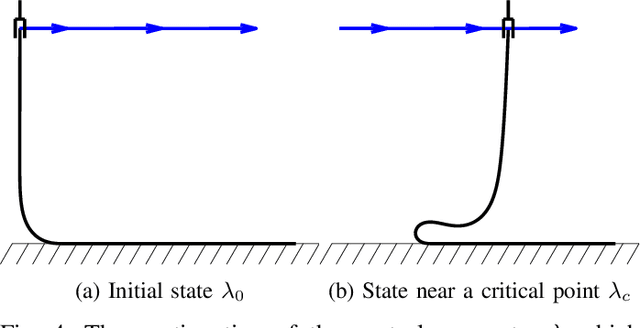
Planning accurate manipulation for deformable objects requires prediction of their state. The prediction is often complicated by a loss of stability that may result in collapse of the deformable object. In this work, stability of a fabric strip folding performed by a robot is studied. We show that there is a static instability in the folding process. This instability is detected in a physics-based simulation and the position of the instability is verified experimentally by real robotic manipulation. Three state-of-the-art methods for folding are assessed in the presence of static instability. It is shown that one of the existing folding paths is suitable for folding of materials with internal friction such as fabrics. Another folding path that utilizes dynamic motion exists for ideal elastic materials without internal friction. Our results show that instability needs to be considered in planning to obtain accurate manipulation of deformable objects.