 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Neural Spike Detection Using Spiking Neural Networks for Neuromorphic iBMI Systems
May 10, 2025Implantable brain-machine interfaces (iBMIs) are evolving to record from thousands of neurons wirelessly but face challenges in data bandwidth, power consumption, and implant size. We propose a novel Spiking Neural Network Spike Detector (SNN-SPD) that processes event-based neural data generated via delta modulation and pulse count modulation, converting signals into sparse events. By leveraging the temporal dynamics and inherent sparsity of spiking neural networks, our method improves spike detection performance while maintaining low computational overhead suitable for implantable devices. Our experimental results demonstrate that the proposed SNN-SPD achieves an accuracy of 95.72% at high noise levels (standard deviation 0.2), which is about 2% higher than the existing Artificial Neural Network Spike Detector (ANN-SPD). Moreover, SNN-SPD requires only 0.41% of the computation and about 26.62% of the weight parameters compared to ANN-SPD, with zero multiplications. This approach balances efficiency and performance, enabling effective data compression and power savings for next-generation iBMIs.
Architectural Exploration of Hybrid Neural Decoders for Neuromorphic Implantable BMI
May 09, 2025This work presents an efficient decoding pipeline for neuromorphic implantable brain-machine interfaces (Neu-iBMI), leveraging sparse neural event data from an event-based neural sensing scheme. We introduce a tunable event filter (EvFilter), which also functions as a spike detector (EvFilter-SPD), significantly reducing the number of events processed for decoding by 192X and 554X, respectively. The proposed pipeline achieves high decoding performance, up to R^2=0.73, with ANN- and SNN-based decoders, eliminating the need for signal recovery, spike detection, or sorting, commonly performed in conventional iBMI systems. The SNN-Decoder reduces computations and memory required by 5-23X compared to NN-, and LSTM-Decoders, while the ST-NN-Decoder delivers similar performance to an LSTM-Decoder requiring 2.5X fewer resources. This streamlined approach significantly reduces computational and memory demands, making it ideal for low-power, on-implant, or wearable iBMIs.
Hybrid Event-Frame Neural Spike Detector for Neuromorphic Implantable BMI
May 14, 2024This work introduces two novel neural spike detection schemes intended for use in next-generation neuromorphic brain-machine interfaces (iBMIs). The first, an Event-based Spike Detector (Ev-SPD) which examines the temporal neighborhood of a neural event for spike detection, is designed for in-vivo processing and offers high sensitivity and decent accuracy (94-97%). The second, Neural Network-based Spike Detector (NN-SPD) which operates on hybrid temporal event frames, provides an off-implant solution using shallow neural networks with impressive detection accuracy (96-99%) and minimal false detections. These methods are evaluated using a synthetic dataset with varying noise levels and validated through comparison with ground truth data. The results highlight their potential in next-gen neuromorphic iBMI systems and emphasize the need to explore this direction further to understand their resource-efficient and high-performance capabilities for practical iBMI settings.
Towards Neuromorphic Compression based Neural Sensing for Next-Generation Wireless Implantable Brain Machine Interface
Dec 15, 2023This work introduces a neuromorphic compression based neural sensing architecture with address-event representation inspired readout protocol for massively parallel, next-gen wireless iBMI. The architectural trade-offs and implications of the proposed method are quantitatively analyzed in terms of compression ratio and spike information preservation. For the latter, we use metrics such as root-mean-square error and correlation coefficient between the original and recovered signal to assess the effect of neuromorphic compression on spike shape. Furthermore, we use accuracy, sensitivity, and false detection rate to understand the effect of compression on downstream iBMI tasks, specifically, spike detection. We demonstrate that a data compression ratio of $50-100$ can be achieved, $5-18\times$ more than prior work, by selective transmission of event pulses corresponding to neural spikes. A correlation coefficient of $\approx0.9$ and spike detection accuracy of over $90\%$ for the worst-case analysis involving $10K$-channel simulated recording and typical analysis using $100$ or $384$-channel real neural recordings. We also analyze the collision handling capability and scalability of the proposed pipeline.
EBBINNOT: A Hardware Efficient Hybrid Event-Frame Tracker for Stationary Neuromorphic Vision Sensors
May 31, 2020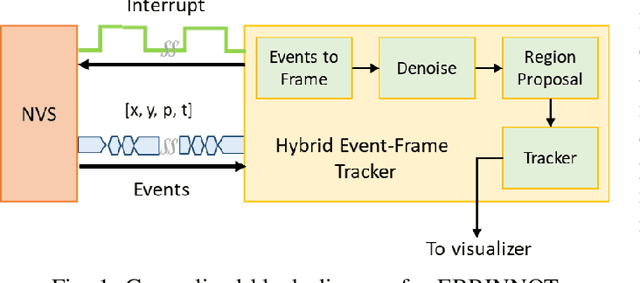
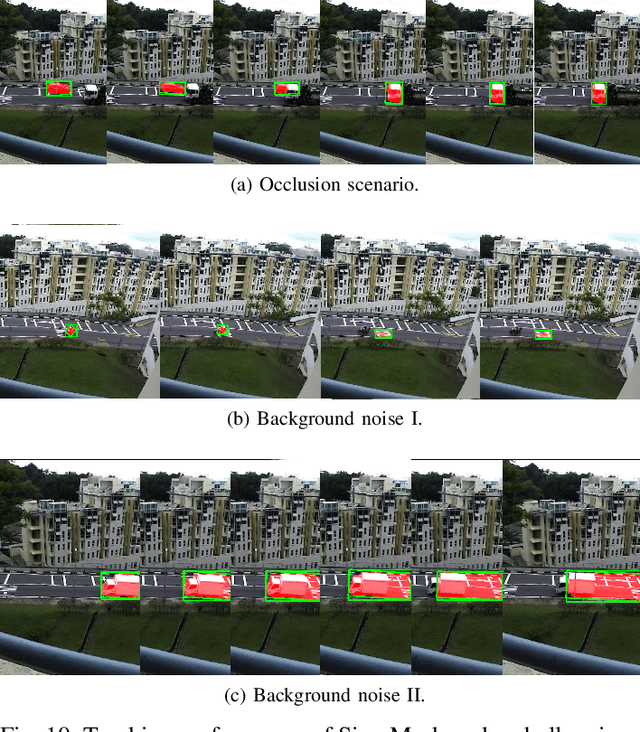
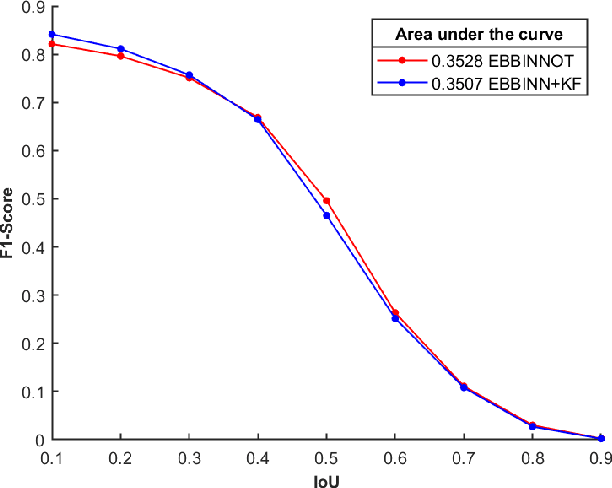
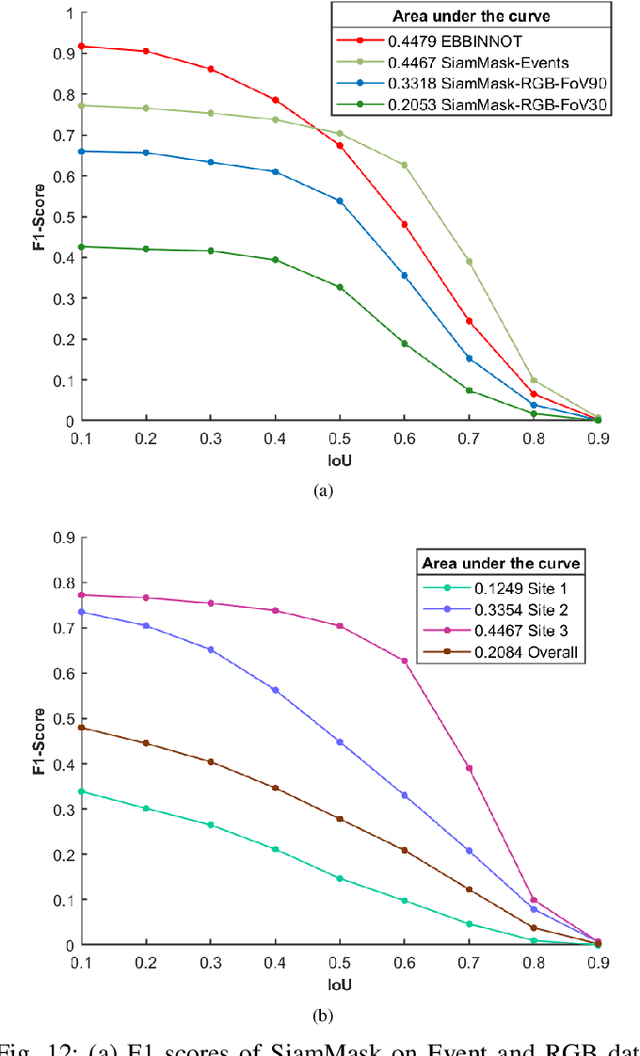
In this paper, we present a hybrid event-frame approach for detecting and tracking objects recorded by a stationary neuromorphic vision sensor (NVS) used in the application of traffic monitoring with a hardware efficient processing pipeline that optimizes memory and computational needs. The usage of NVS gives the advantage of rejecting background while it has a unique disadvantage of fragmented objects due to lack of events generated by smooth areas such as glass windows. To exploit the background removal, we propose an event based binary image (EBBI) creation that signals presence or absence of events in a frame duration. This reduces memory requirement and enables usage of simple algorithms like median filtering and connected component labeling (CCL) for denoise and region proposal (RP) respectively. To overcome the fragmentation issue, a YOLO inspired neural network based detector and classifier (NNDC) to merge fragmented region proposals has been proposed. Finally, a simplified version of Kalman filter, termed overlap based tracker (OT), exploiting overlap between detections and tracks is proposed with heuristics to overcome occlusion. The proposed pipeline is evaluated using more than 5 hours of traffic recordings. Our proposed hybrid architecture outperformed (AUC = $0.45$) Deep learning (DL) based tracker SiamMask (AUC = $0.33$) operating on simultaneously recorded RGB frames while requiring $2200\times$ less computations. Compared to pure event based mean shift (AUC = $0.31$), our approach requires $68\times$ more computations but provides much better performance. Finally, we also evaluated our performance on two different NVS: DAVIS and CeleX and demonstrated similar gains. To the best of our knowledge, this is the first report where an NVS based solution is directly compared to other simultaneously recorded frame based method and shows tremendous promise.