 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Drive from Simulation without Real World Labels
Dec 13, 2018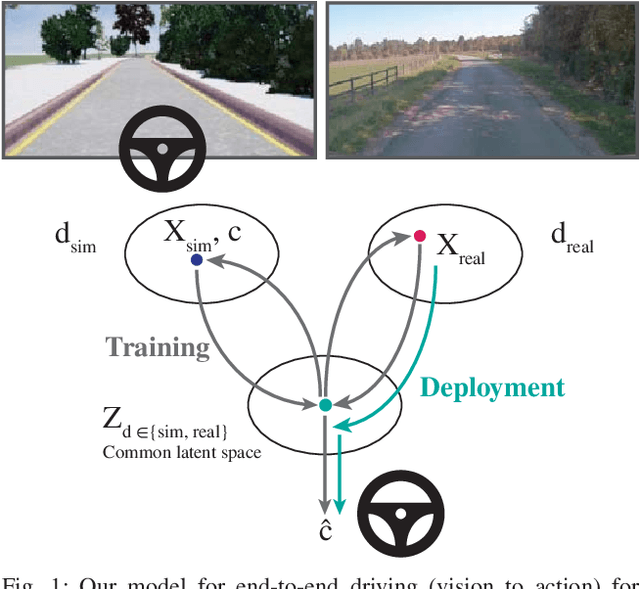
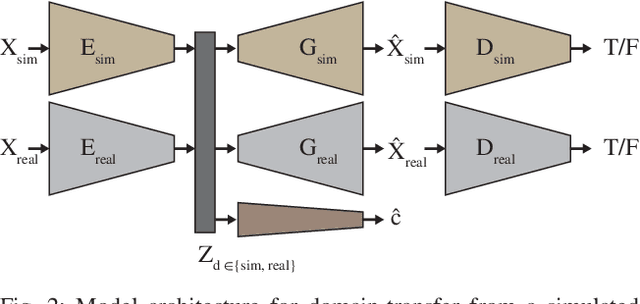
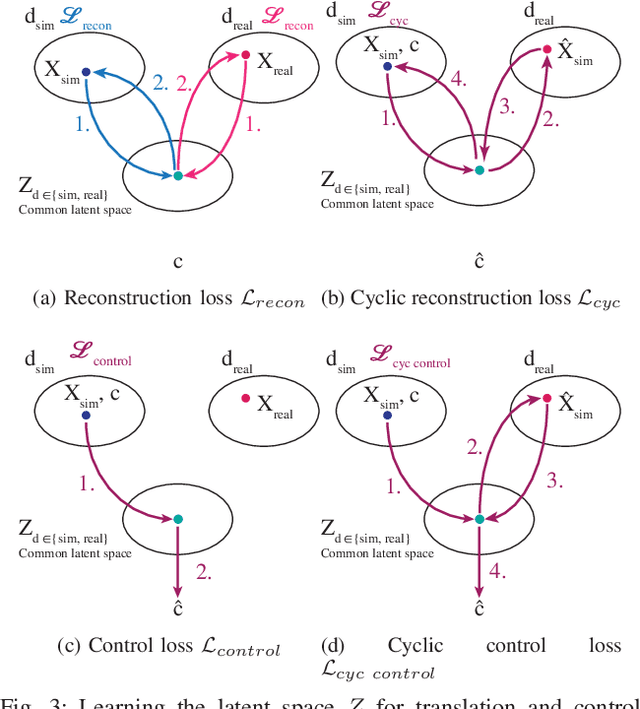
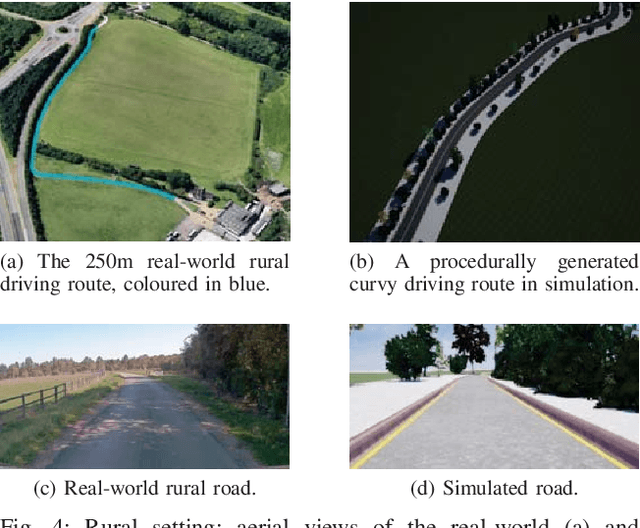
Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world. Here we present and evaluate a method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels. Our approach leverages recent advances in image-to-image translation to achieve domain transfer while jointly learning a single-camera control policy from simulation control labels. We assess the driving performance of this method using both open-loop regression metrics, and closed-loop performance operating an autonomous vehicle on rural and urban roads.
Learning to Drive in a Day
Sep 11, 2018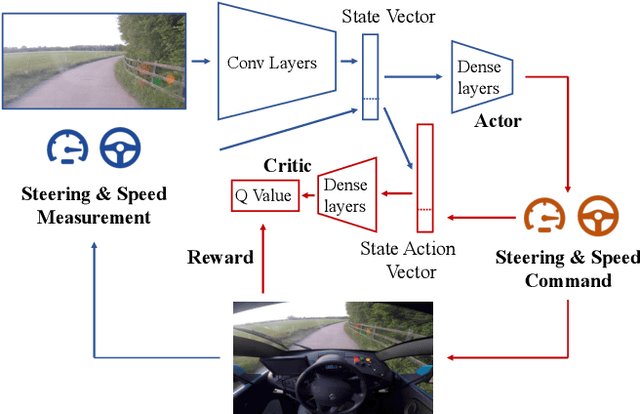
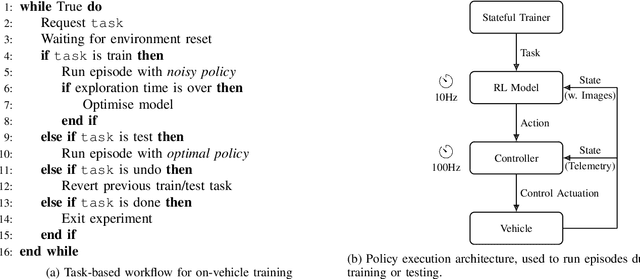
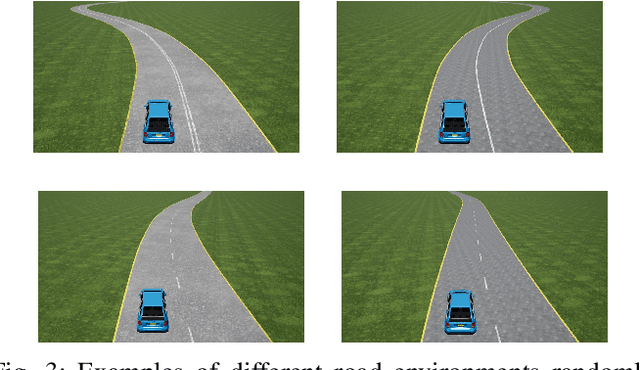
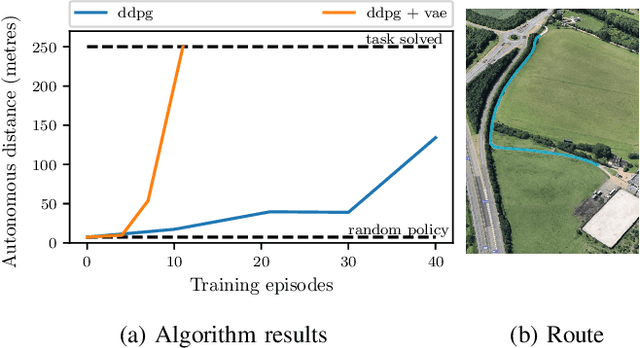
We demonstrate the first application of deep reinforcement learning to autonomous driving. From randomly initialised parameters, our model is able to learn a policy for lane following in a handful of training episodes using a single monocular image as input. We provide a general and easy to obtain reward: the distance travelled by the vehicle without the safety driver taking control. We use a continuous, model-free deep reinforcement learning algorithm, with all exploration and optimisation performed on-vehicle. This demonstrates a new framework for autonomous driving which moves away from reliance on defined logical rules, mapping, and direct supervision. We discuss the challenges and opportunities to scale this approach to a broader range of autonomous driving tasks.