 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe NVIDIA PilotNet Experiments
Oct 17, 2020

Four years ago, an experimental system known as PilotNet became the first NVIDIA system to steer an autonomous car along a roadway. This system represents a departure from the classical approach for self-driving in which the process is manually decomposed into a series of modules, each performing a different task. In PilotNet, on the other hand, a single deep neural network (DNN) takes pixels as input and produces a desired vehicle trajectory as output; there are no distinct internal modules connected by human-designed interfaces. We believe that handcrafted interfaces ultimately limit performance by restricting information flow through the system and that a learned approach, in combination with other artificial intelligence systems that add redundancy, will lead to better overall performing systems. We continue to conduct research toward that goal. This document describes the PilotNet lane-keeping effort, carried out over the past five years by our NVIDIA PilotNet group in Holmdel, New Jersey. Here we present a snapshot of system status in mid-2020 and highlight some of the work done by the PilotNet group.
VisualBackProp: efficient visualization of CNNs
May 19, 2017
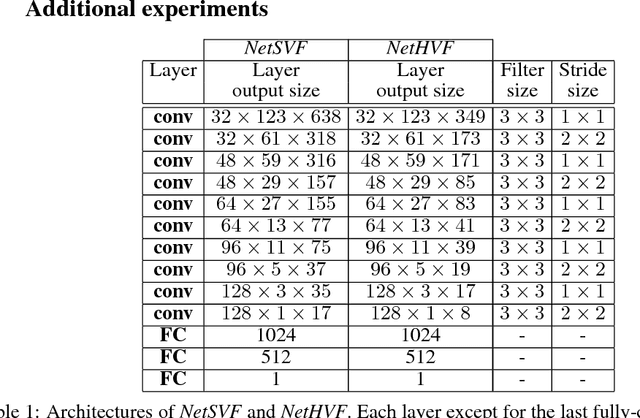
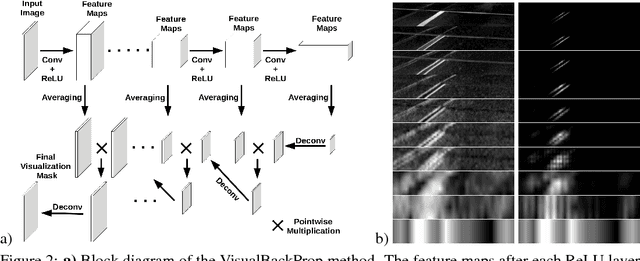
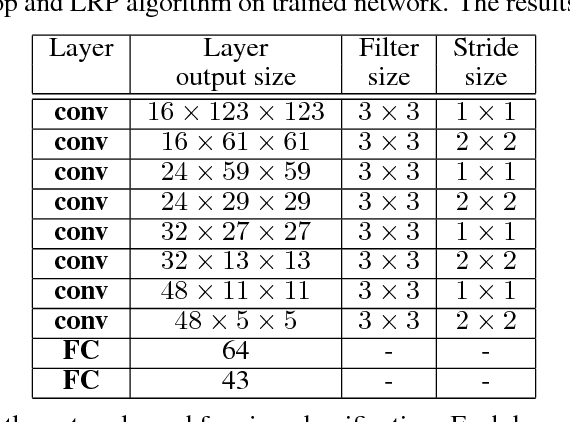
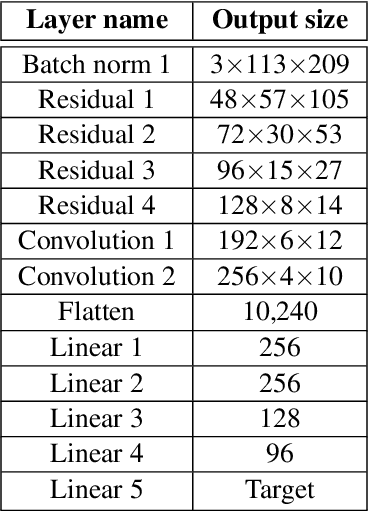
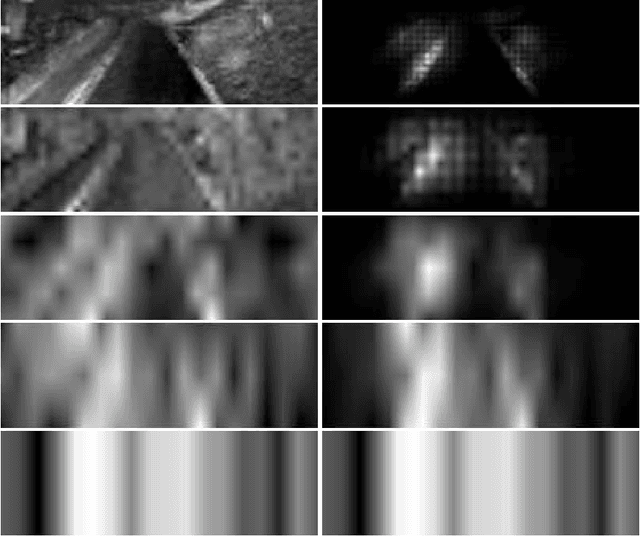
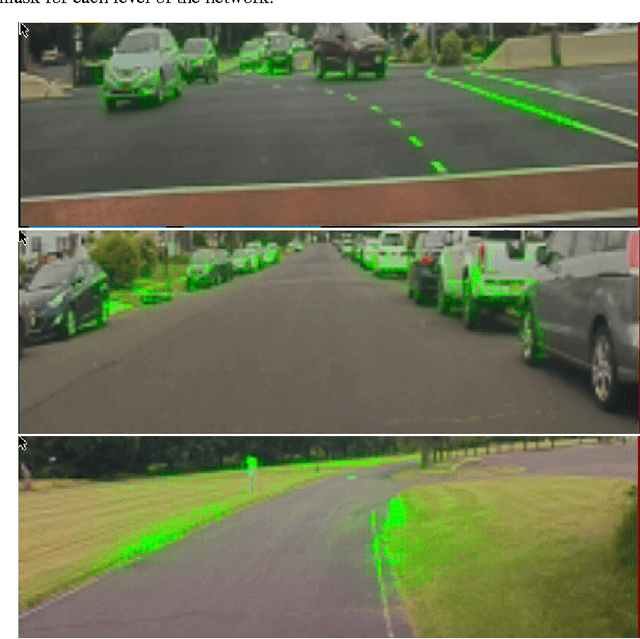
This paper proposes a new method, that we call VisualBackProp, for visualizing which sets of pixels of the input image contribute most to the predictions made by the convolutional neural network (CNN). The method heavily hinges on exploring the intuition that the feature maps contain less and less irrelevant information to the prediction decision when moving deeper into the network. The technique we propose was developed as a debugging tool for CNN-based systems for steering self-driving cars and is therefore required to run in real-time, i.e. it was designed to require less computations than a forward propagation. This makes the presented visualization method a valuable debugging tool which can be easily used during both training and inference. We furthermore justify our approach with theoretical arguments and theoretically confirm that the proposed method identifies sets of input pixels, rather than individual pixels, that collaboratively contribute to the prediction. Our theoretical findings stand in agreement with the experimental results. The empirical evaluation shows the plausibility of the proposed approach on the road video data as well as in other applications and reveals that it compares favorably to the layer-wise relevance propagation approach, i.e. it obtains similar visualization results and simultaneously achieves order of magnitude speed-ups.
Explaining How a Deep Neural Network Trained with End-to-End Learning Steers a Car
Apr 25, 2017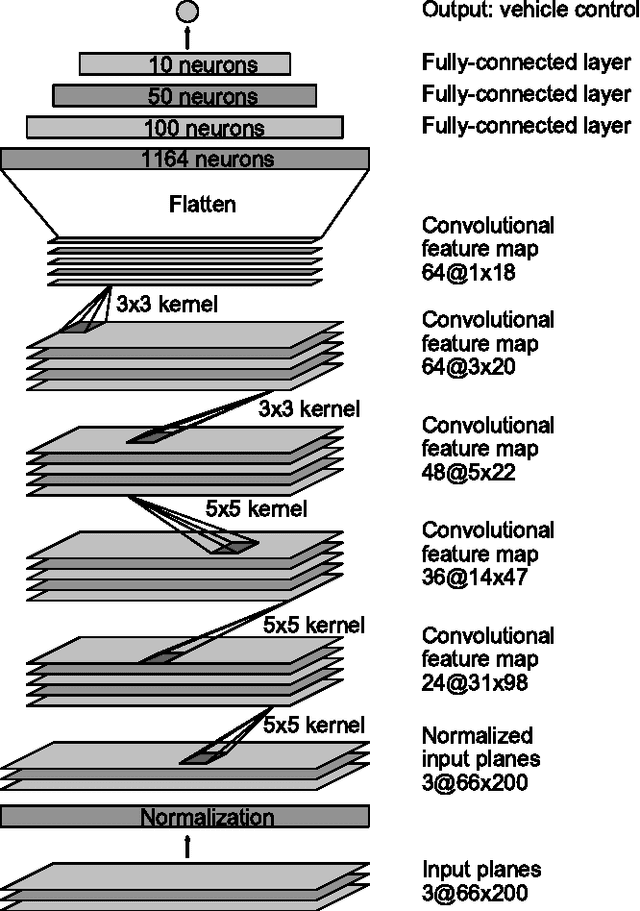
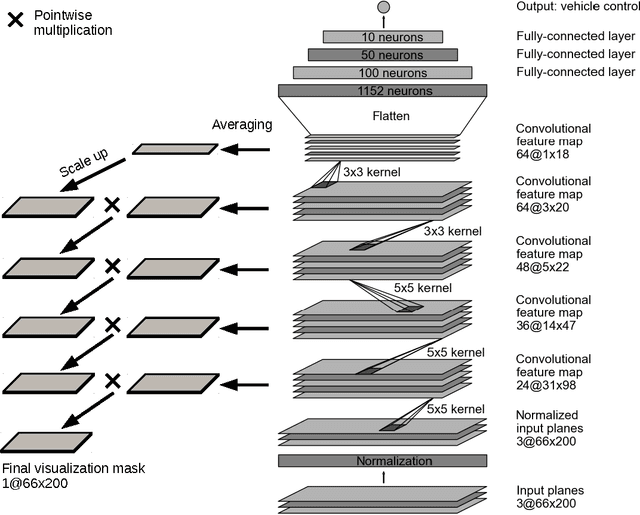
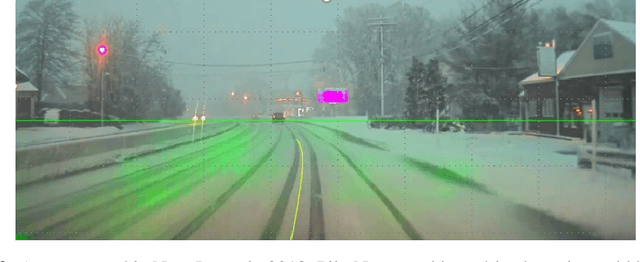
As part of a complete software stack for autonomous driving, NVIDIA has created a neural-network-based system, known as PilotNet, which outputs steering angles given images of the road ahead. PilotNet is trained using road images paired with the steering angles generated by a human driving a data-collection car. It derives the necessary domain knowledge by observing human drivers. This eliminates the need for human engineers to anticipate what is important in an image and foresee all the necessary rules for safe driving. Road tests demonstrated that PilotNet can successfully perform lane keeping in a wide variety of driving conditions, regardless of whether lane markings are present or not. The goal of the work described here is to explain what PilotNet learns and how it makes its decisions. To this end we developed a method for determining which elements in the road image most influence PilotNet's steering decision. Results show that PilotNet indeed learns to recognize relevant objects on the road. In addition to learning the obvious features such as lane markings, edges of roads, and other cars, PilotNet learns more subtle features that would be hard to anticipate and program by engineers, for example, bushes lining the edge of the road and atypical vehicle classes.
Fast Incremental Learning for Off-Road Robot Navigation
Jun 26, 2016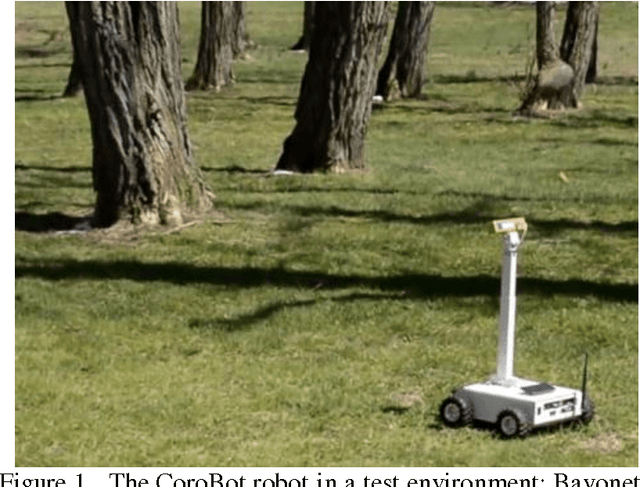
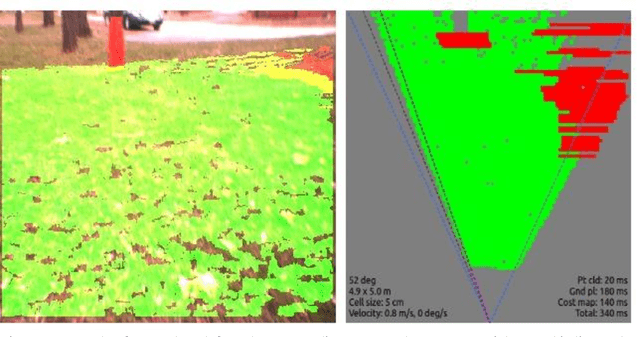
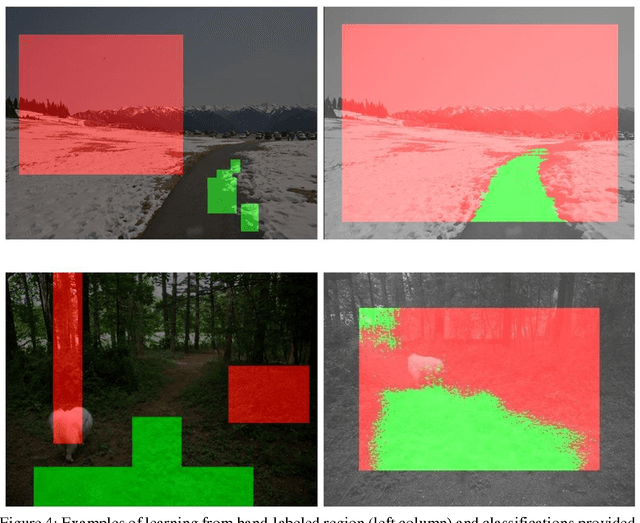
A promising approach to autonomous driving is machine learning. In such systems, training datasets are created that capture the sensory input to a vehicle as well as the desired response. A disadvantage of using a learned navigation system is that the learning process itself may require a huge number of training examples and a large amount of computing. To avoid the need to collect a large training set of driving examples, we describe a system that takes advantage of the huge number of training examples provided by ImageNet, but is able to adapt quickly using a small training set for the specific driving environment.
End to End Learning for Self-Driving Cars
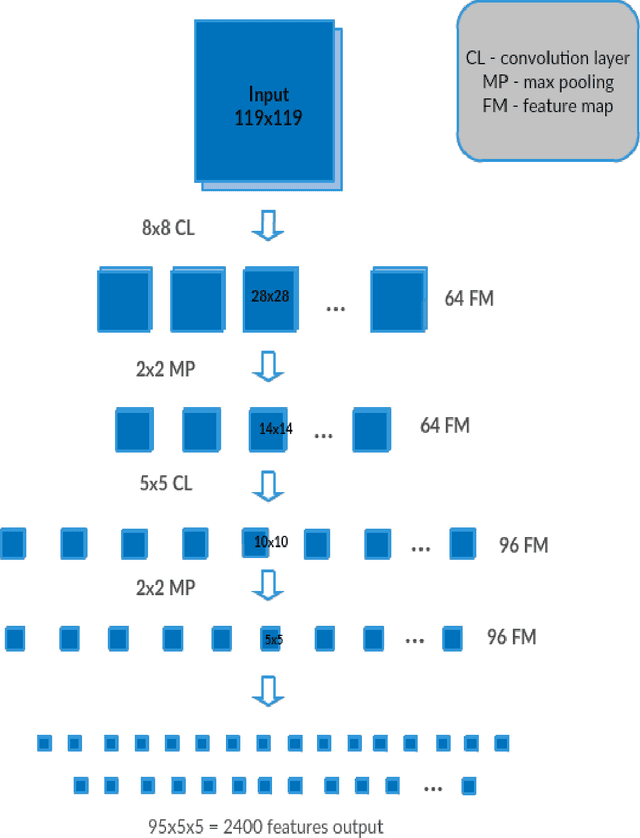
Apr 25, 2016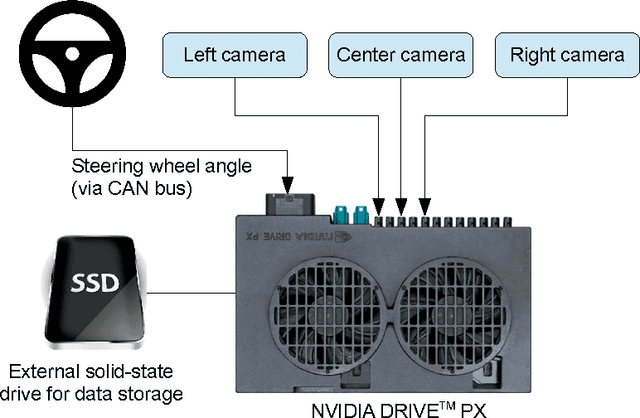
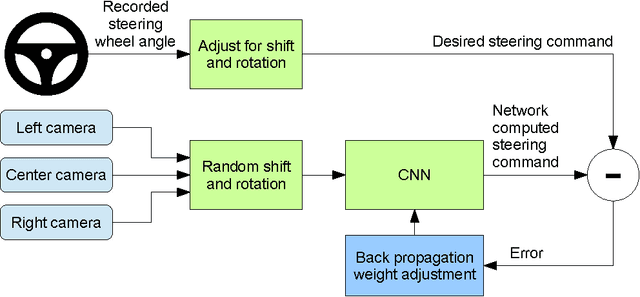
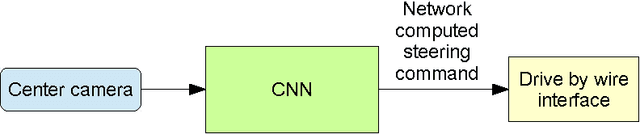
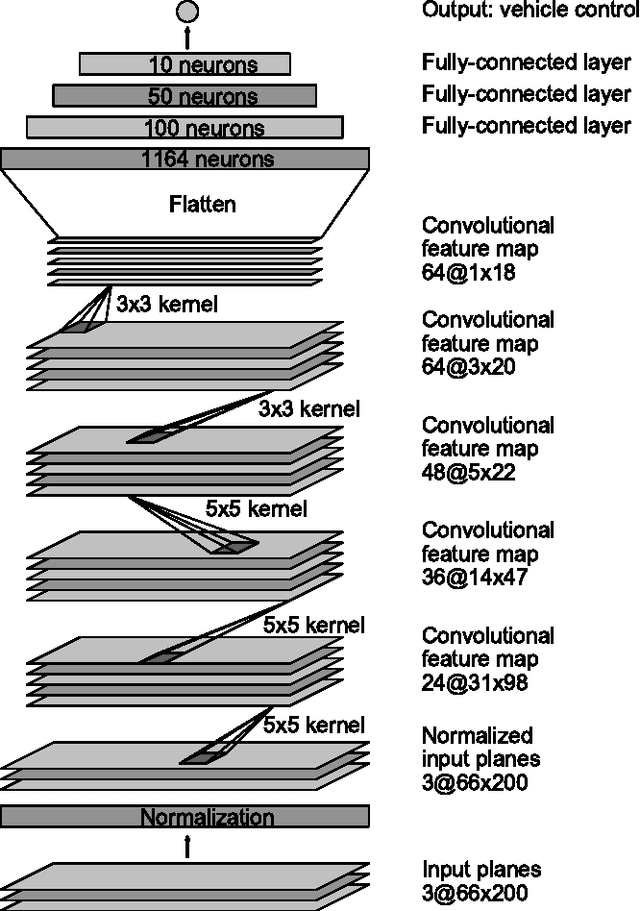
We trained a convolutional neural network (CNN) to map raw pixels from a single front-facing camera directly to steering commands. This end-to-end approach proved surprisingly powerful. With minimum training data from humans the system learns to drive in traffic on local roads with or without lane markings and on highways. It also operates in areas with unclear visual guidance such as in parking lots and on unpaved roads. The system automatically learns internal representations of the necessary processing steps such as detecting useful road features with only the human steering angle as the training signal. We never explicitly trained it to detect, for example, the outline of roads. Compared to explicit decomposition of the problem, such as lane marking detection, path planning, and control, our end-to-end system optimizes all processing steps simultaneously. We argue that this will eventually lead to better performance and smaller systems. Better performance will result because the internal components self-optimize to maximize overall system performance, instead of optimizing human-selected intermediate criteria, e.g., lane detection. Such criteria understandably are selected for ease of human interpretation which doesn't automatically guarantee maximum system performance. Smaller networks are possible because the system learns to solve the problem with the minimal number of processing steps. We used an NVIDIA DevBox and Torch 7 for training and an NVIDIA DRIVE(TM) PX self-driving car computer also running Torch 7 for determining where to drive. The system operates at 30 frames per second (FPS).